



















Turbot中级教程-应用-smach状态机
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Turbot中级教程-应用-smach状态机
说明
- 介绍在turbot下应用smach状态机
前提准备
- [Turbot && Remote PC] 安装相关包
$ sudo apt-get install ros-kinetic-executive-smach ros-kinetic-executive-smach-visualization操作步骤
- [Turbot] 新终端执行,启动底盘
$ roslaunch turbot_bringup minimal.launch- [Turbot] 新终端执行,运行smach状态机例子
$ roslaunch turbot_tasks simple_route_smach.launch- [Remote PC] 新终端执行,启动smach_viewer可视化界面
$ rosrun smach_viewer smach_viewer.py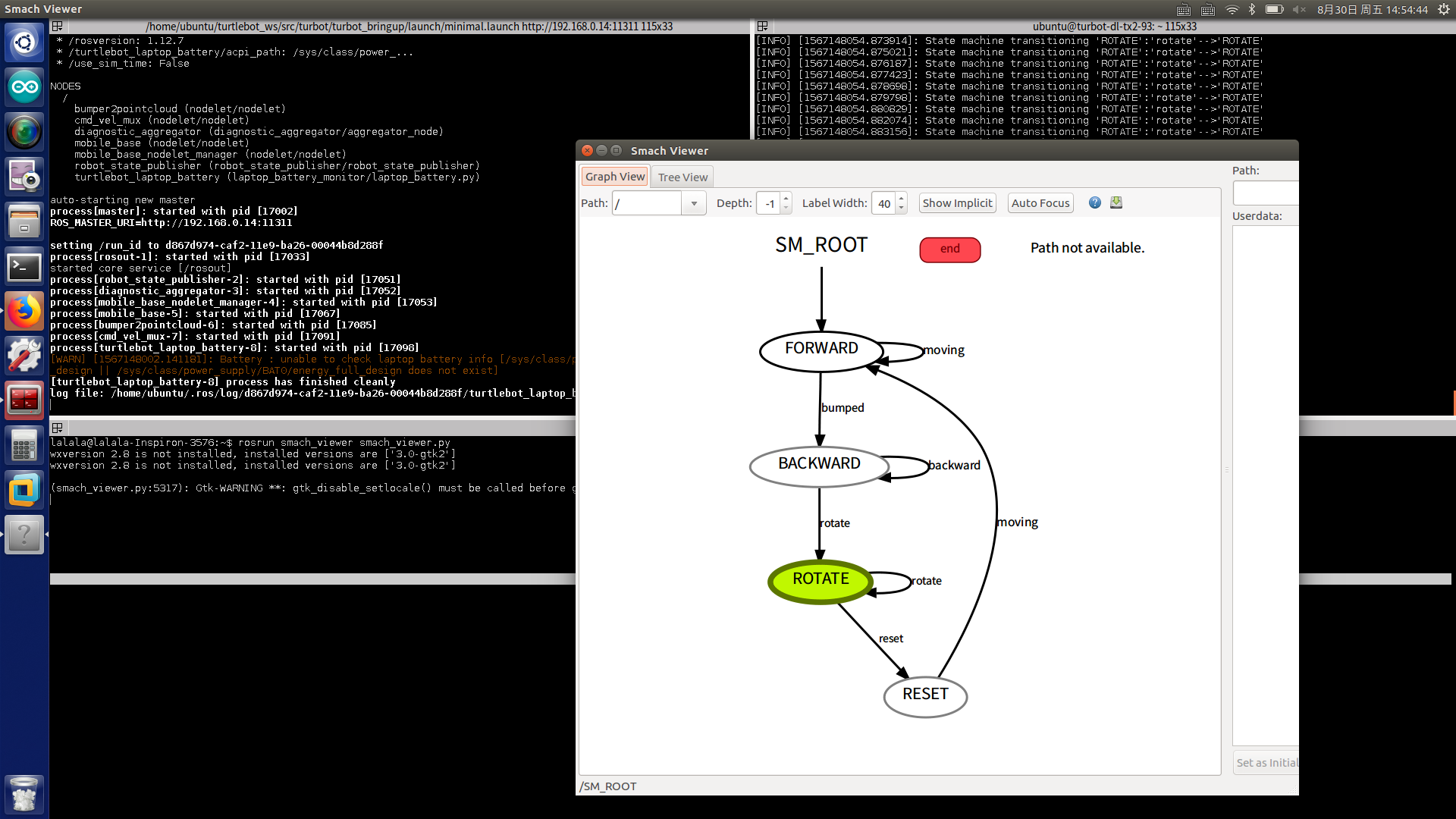
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=66018075&cid=114522909&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号