



















ROS与VSLAM入门教程-rtabmap_ros-双目户外建图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS与VSLAM入门教程-rtabmap_ros-双目户外建图
说明:
- 介绍RTAB-Map利用双目相机进行建图
- 本章利用Bumblebee2双目相机,最大的有点是进行户外建图
3D Mapping/3维建图
- 配置:

-
ROS bags:
-
启动launch,demo_stereo_outdoor.launch
$ roslaunch rtabmap_ros demo_stereo_outdoor.launch
$ rosbag play --clock stereo_outdoorA.bag
[...]
$ rosbag play --clock stereo_outdoorB.bag- demo_stereo_outdoor.launch代码如下:
<launch>
<!--
Demo of outdoor stereo mapping.
From bag:
$ rosbag record
/stereo_camera/left/image_raw_throttle/compressed
/stereo_camera/right/image_raw_throttle/compressed
/stereo_camera/left/camera_info_throttle
/stereo_camera/right/camera_info_throttle
/tf
$ roslaunch rtabmap demo_stereo_outdoor.launch
$ rosbag play -.-clock stereo_oudoorA.bag
-->
<!-- Choose visualization -->
<arg name="rviz" default="true" />
<arg name="rtabmapviz" default="false" />
<param name="use_sim_time" type="bool" value="True"/>
<!-- Just to uncompress images for stereo_image_rect -->
<node name="republish_left" type="republish" pkg="image_transport" args="compressed in:=/stereo_camera/left/image_raw_throttle raw out:=/stereo_camera/left/image_raw_throttle_relay" />
<node name="republish_right" type="republish" pkg="image_transport" args="compressed in:=/stereo_camera/right/image_raw_throttle raw out:=/stereo_camera/right/image_raw_throttle_relay" />
<!-- Run the ROS package stereo_image_proc for image rectification -->
<group ns="/stereo_camera" >
<node pkg="nodelet" type="nodelet" name="stereo_nodelet" args="manager"/>
<node pkg="stereo_image_proc" type="stereo_image_proc" name="stereo_image_proc">
<remap from="left/image_raw" to="left/image_raw_throttle_relay"/>
<remap from="left/camera_info" to="left/camera_info_throttle"/>
<remap from="right/image_raw" to="right/image_raw_throttle_relay"/>
<remap from="right/camera_info" to="right/camera_info_throttle"/>
<param name="disparity_range" value="128"/>
</node>
</group>
<!-- Stereo Odometry -->
<node pkg="rtabmap_ros" type="stereo_odometry" name="stereo_odometry" output="screen">
<remap from="left/image_rect" to="/stereo_camera/left/image_rect"/>
<remap from="right/image_rect" to="/stereo_camera/right/image_rect"/>
<remap from="left/camera_info" to="/stereo_camera/left/camera_info_throttle"/>
<remap from="right/camera_info" to="/stereo_camera/right/camera_info_throttle"/>
<remap from="odom" to="/stereo_odometry"/>
<param name="frame_id" type="string" value="base_footprint"/>
<param name="odom_frame_id" type="string" value="odom"/>
<param name="Odom/Strategy" type="string" value="0"/> <!-- 0=BOW, 1=OpticalFlow -->
<param name="Odom/EstimationType" type="string" value="1"/> <!-- 3D->2D (PnP) -->
<param name="Odom/MinInliers" type="string" value="10"/>
<param name="Odom/RoiRatios" type="string" value="0.03 0.03 0.04 0.04"/>
<param name="Odom/MaxDepth" type="string" value="10"/>
<param name="OdomBow/NNDR" type="string" value="0.8"/>
<param name="Odom/MaxFeatures" type="string" value="1000"/>
<param name="Odom/FillInfoData" type="string" value="$(arg rtabmapviz)"/>
<param name="GFTT/MinDistance" type="string" value="10"/>
<param name="GFTT/QualityLevel" type="string" value="0.00001"/>
</node>
<group ns="rtabmap">
<!-- Visual SLAM: args: "delete_db_on_start" and "udebug" -->
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="frame_id" type="string" value="base_footprint"/>
<param name="subscribe_stereo" type="bool" value="true"/>
<param name="subscribe_depth" type="bool" value="false"/>
<remap from="left/image_rect" to="/stereo_camera/left/image_rect_color"/>
<remap from="right/image_rect" to="/stereo_camera/right/image_rect"/>
<remap from="left/camera_info" to="/stereo_camera/left/camera_info_throttle"/>
<remap from="right/camera_info" to="/stereo_camera/right/camera_info_throttle"/>
<remap from="odom" to="/stereo_odometry"/>
<param name="queue_size" type="int" value="30"/>
<!-- RTAB-Map's parameters -->
<param name="Rtabmap/TimeThr" type="string" value="700"/>
<param name="Rtabmap/DetectionRate" type="string" value="1"/>
<param name="Kp/WordsPerImage" type="string" value="200"/>
<param name="Kp/RoiRatios" type="string" value="0.03 0.03 0.04 0.04"/>
<param name="Kp/DetectorStrategy" type="string" value="0"/> <!-- use SURF -->
<param name="Kp/NNStrategy" type="string" value="1"/> <!-- kdTree -->
<param name="SURF/HessianThreshold" type="string" value="1000"/>
<param name="LccBow/MinInliers" type="string" value="10"/>
<param name="LccBow/EstimationType" type="string" value="1"/> <!-- 3D->2D (PnP) -->
<param name="LccReextract/Activated" type="string" value="true"/>
<param name="LccReextract/MaxWords" type="string" value="500"/>
<param name="LccReextract/MaxDepth" type="string" value="10"/>
</node>
<!-- Visualisation RTAB-Map -->
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_stereo" type="bool" value="true"/>
<param name="subscribe_odom_info" type="bool" value="true"/>
<param name="queue_size" type="int" value="10"/>
<param name="frame_id" type="string" value="base_footprint"/>
<remap from="left/image_rect" to="/stereo_camera/left/image_rect_color"/>
<remap from="right/image_rect" to="/stereo_camera/right/image_rect"/>
<remap from="left/camera_info" to="/stereo_camera/left/camera_info_throttle"/>
<remap from="right/camera_info" to="/stereo_camera/right/camera_info_throttle"/>
<remap from="odom_info" to="/odom_info"/>
<remap from="odom" to="/stereo_odometry"/>
<remap from="mapData" to="mapData"/>
</node>
</group>
<!-- Visualisation RVIZ -->
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/config/demo_stereo_outdoor.rviz"/>
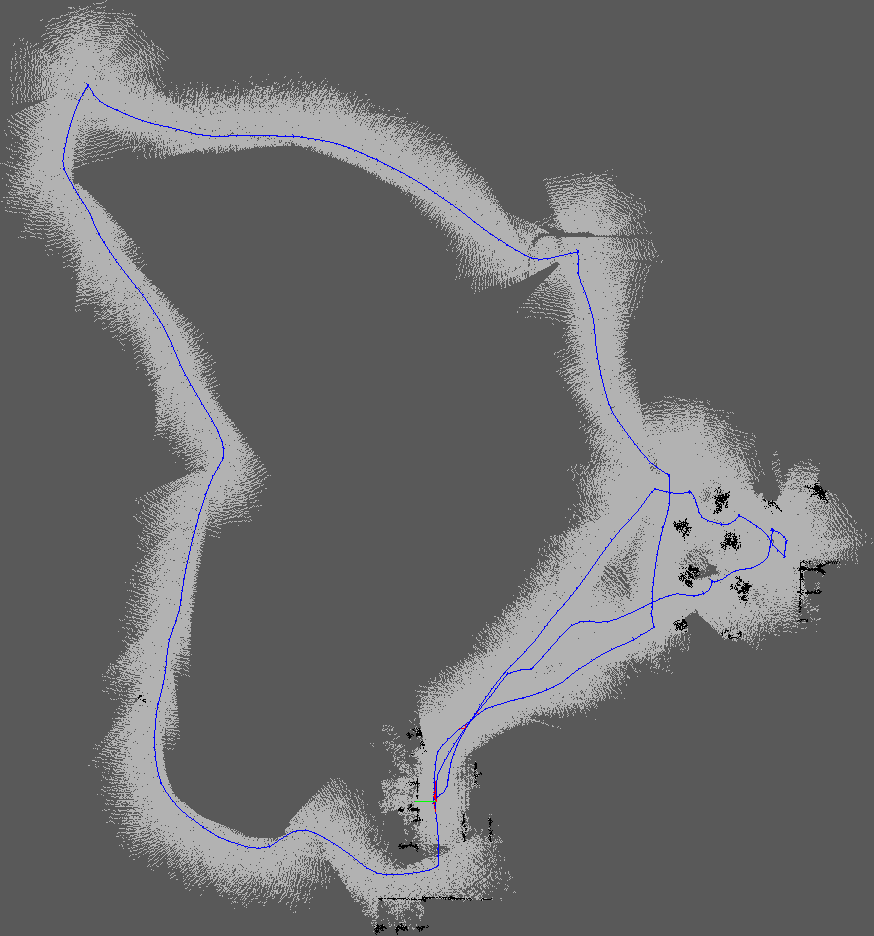
</launch>- 效果图:

- Occupancy grid with Odometry
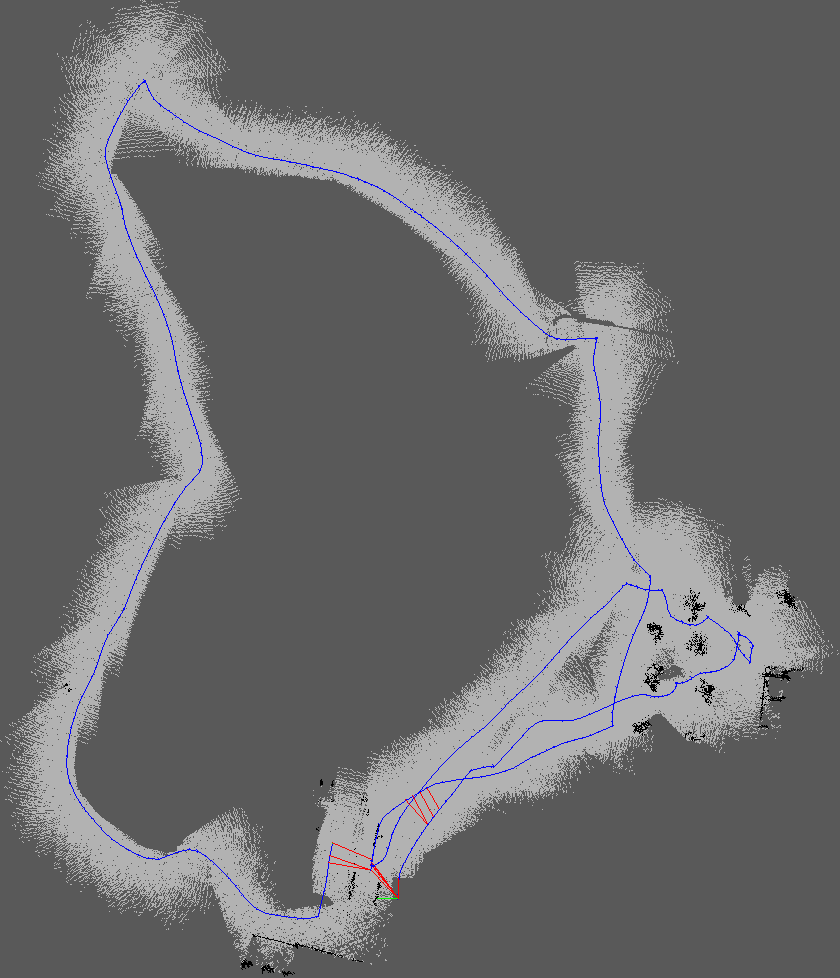
- Occupancy grid With loop closures
获取双目的视觉里程:
-
使用viso2_ros获取视觉里程
-
演示代码如下:
<node pkg="viso2_ros" type="stereo_odometer" name="stereo_odometer" output="screen">
<remap from="stereo" to="/stereo_camera"/>
<remap from="image" to="image_rect"/>
<remap from="stereo_odometer/odometry" to="odometry" />
<param name="base_link_frame_id" value="base_footprint"/>
<param name="odom_frame_id" value="odom"/>
<param name="ref_frame_change_method" value="1"/>
<param name="queue_size" value="30"/>
</node>
<!-- rename camera info topics so viso2_ros can understand -->
<node name="camInfoL" type="relay" pkg="topic_tools" args="/stereo_camera/left/camera_info_throttle /stereo_camera/left/camera_info"/>
<node name="camInfoR" type="relay" pkg="topic_tools" args="/stereo_camera/right/camera_info_throttle /stereo_camera/right/camera_info"/>- 使用fovis_ros获取视觉里程
- 演示代码如下:
<node pkg="fovis_ros" type="fovis_stereo_odometer" name="stereo_odometer" >
<remap from="/stereo/left/image" to="/stereo_camera/left/image_rect" />
<remap from="/stereo/right/image" to="/stereo_camera/right/image_rect" />
<remap from="/stereo/left/camera_info" to="/stereo_camera/left/camera_info_throttle" />
<remap from="/stereo/right/camera_info" to="/stereo_camera/right/camera_info_throttle" />
<remap from="odometry" to="odometry" />
</node>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号