



















ROS与VSLAM入门教程-birds-eye-view安装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS与VSLAM入门教程-birds-eye-view安装
说明:
- 介绍如何安装birds-eye-view
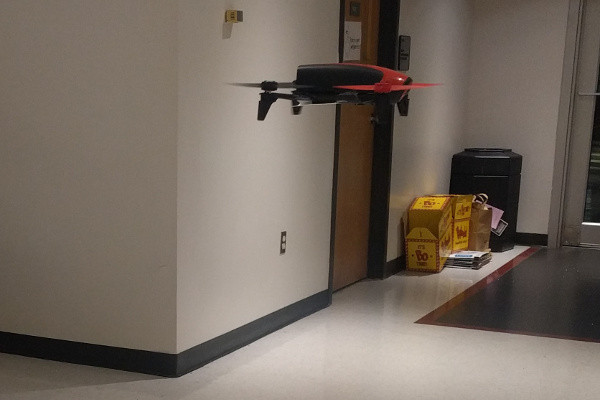
- 鸟瞰视图是一个ROS套件,允许自主飞行器追踪并保持与自主地面机器人的相对位置
环境:
- ros-indigo-desktop-full
- ros-indigo-turtlebot
- urg-node (or equivalent laser range finder package)
- usb_cam
- bebop_autonomy
- ORB-SLAM 2
步骤:
- 下载编译
cd ~/catkin_ws/
git clone https://github.com/hoodsr/birds-eye-view
chmod +x TurtlebotSetup.sh
./TurtlebotSetup.sh效果图:
- 效果图1:

-
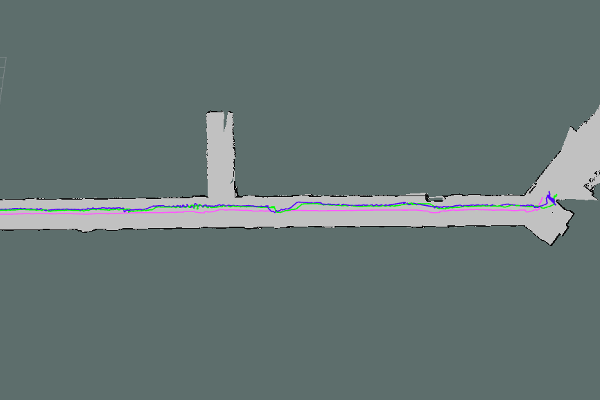
效果图2:

-
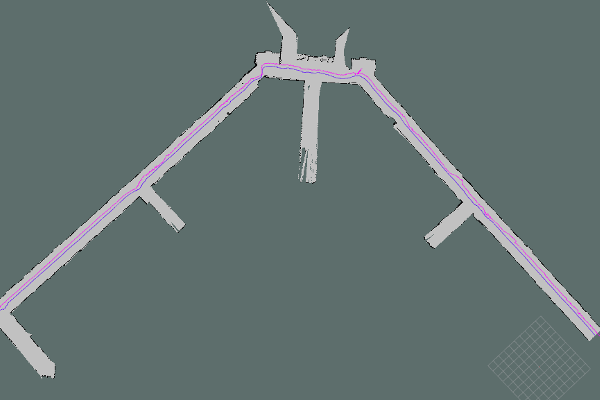
效果图3:
-
效果图4:
-
效果图5:

-
效果图6:
参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号