



















PX4开发指南-3.3.飞行控制栈
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4开发指南-3.3.飞行控制栈
PX4飞行控制栈
- PX4飞行控制栈集成了各种自主无人机的制导、导航以及控制算法。支持的机型包括固定翼,多旋翼以及垂直起降飞行器,算法包括姿态估计算法和姿态控制算法。
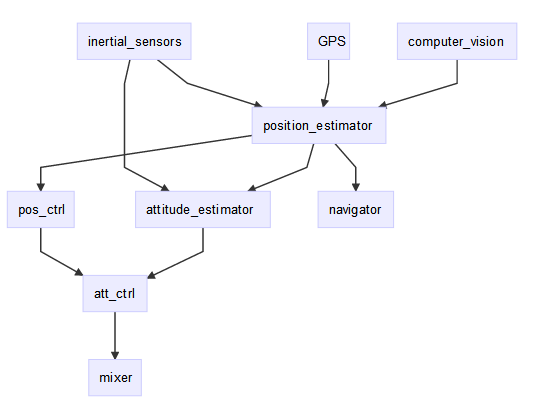
估计与控制结构
- 下图所示为一个典型框图(typical blocks)的实现示例。根据飞行器的不同,其中的一些框图(blocks)也可以组成一个单独的应用(例如,当我们需要一个特定飞行器的模型预测控制器时)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号