



















PX4开发指南-3.6.PWM限制状态机
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4开发指南-3.6.PWM限制状态机
PWM_limit状态机
+- PWM_limit 状态机根据解锁前和解锁后的输入控制PWM输出。并在”解锁“、油门加速和解锁信号的断言之间提供延迟。
快速概要
-
输入
-
armed: 置1使能诸如旋转螺旋桨的危险行为。
-
pre-armed: 置1使能诸如移动控制面的良性行为。
-这个输入覆盖当前状态。
- pre-aremd置1无视当前状态,立即强制转移到状态ON,值0则回复到当前状态。
-
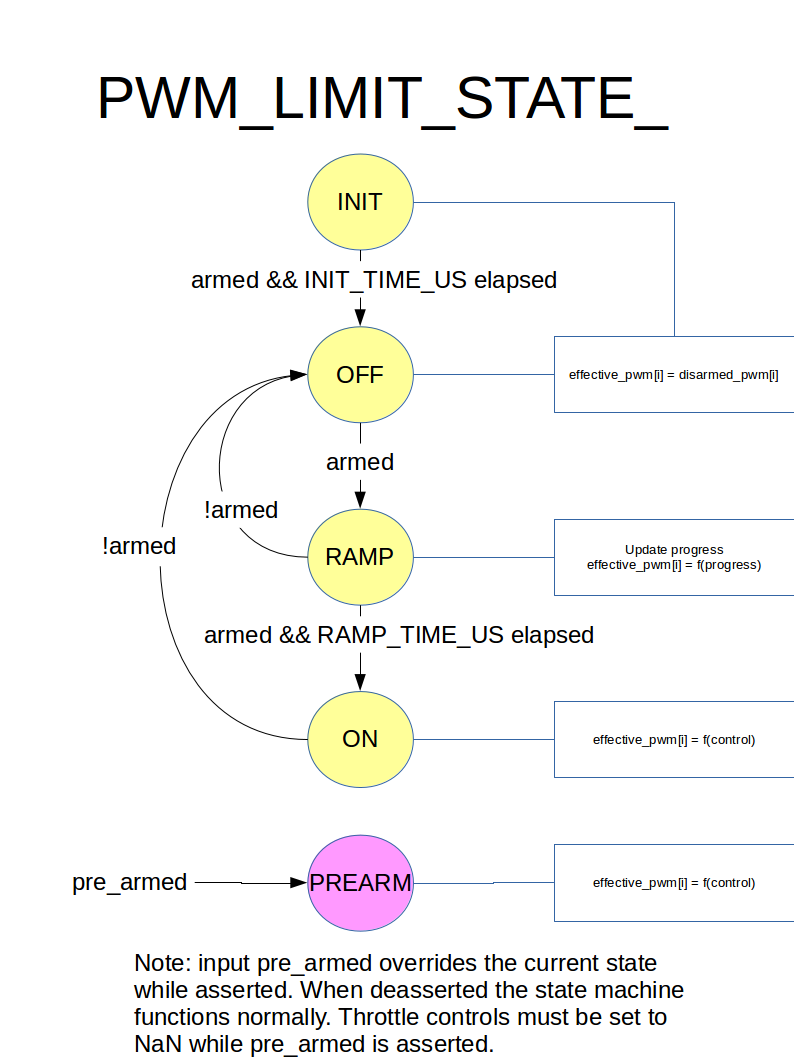
状态
-
INIT和OFF
- pwm输出值设定为未解锁值。
-
RAMP
- pwm输出值从未解锁值上升到最小值。
-
ON
- pwm输出值根据控制量设定。
状态转移图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号