



















Turtlebot3-ROS2入门教程-使用Navigation2进行导航
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

Turtlebot3-ROS2入门教程-使用Navigation2进行导航
说明
- 介绍在turtlebot3机器人上使用navigation2进行导航
相关设备:
- Turtlebot3-ROS2套件,采购地址
操作步骤
- [TurtleBot] 启动小车
$ ros2 launch turtlebot3_bringup robot.launch.py- [Remote PC] 启动Navigation2节点
$ ros2 launch turtlebot3_navigation2 navigation2.launch.py map:=$HOME/map.yaml- 点击
2D Pose Estimate进行初始化位置
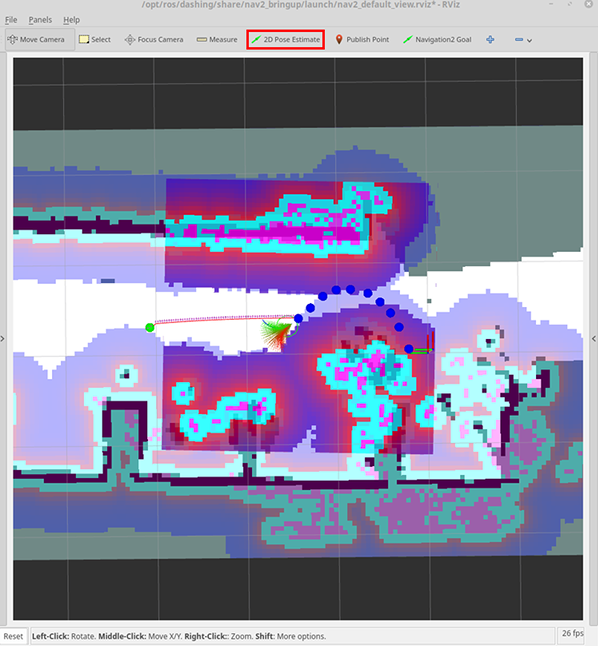
- 点击
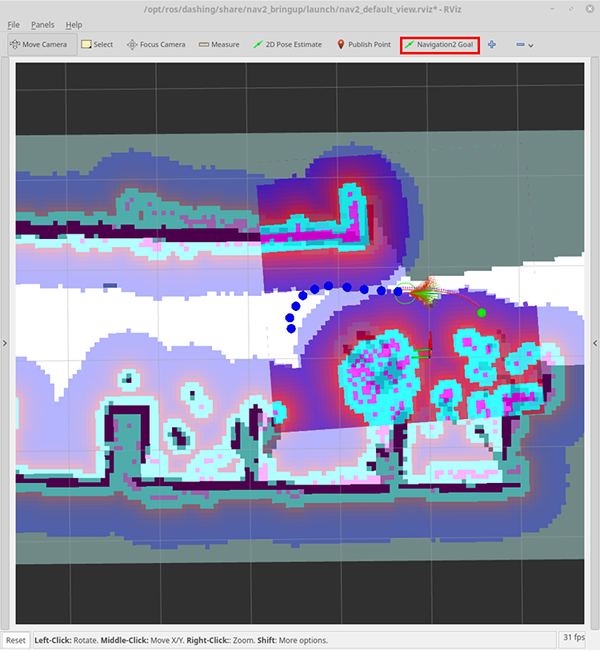
Navigation2 Goal给定一个目标位置以及到达时的朝向
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=497886574&bvid=BV13K41157LX&cid=183878898&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流