



















Ailibot-QT教程-按钮调用ROS的librviz
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 在ROS QT GUI模板的基础上,按钮调用ROS的librviz
直接运行librviz应用程序 操作步骤
- 安装预编译的Debian软件包
$ sudo apt-get install ros-kinetic-visualization-tutorials- 启动roscore
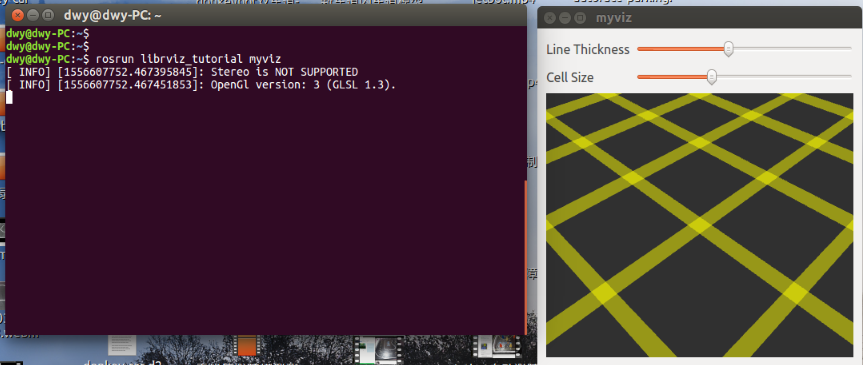
$ roscore- 运行librviz应用程序
$ rosrun librviz_tutorial myviz-
拉动
Line Thickness滑条,调整线的粗细 -
拉动
Cell Size滑条,调整方块的大小
效果如下
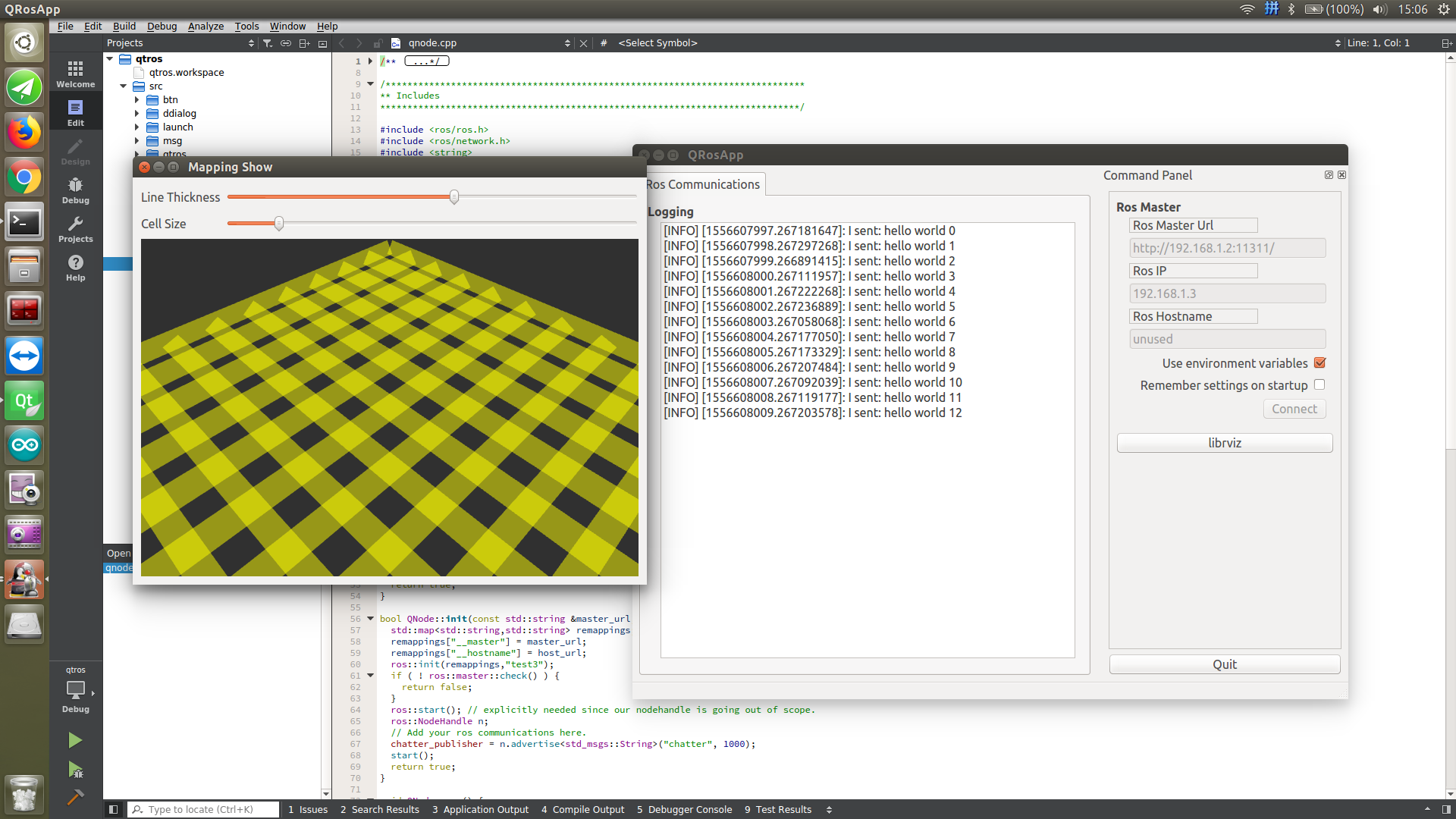
按钮调用ROS的librviz 操作步骤
- 启动roscore
$ roscore- 运行QT程序
$ ~/tools/ailibot_qt/ailibot_qt_test3-
勾选
Use environment variables,点击Connect -
点击按钮
librviz -
拉动
Line Thickness滑条,调整线的粗细 -
拉动
Cell Size滑条,调整方块的大小
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号