



















LEO机器人入门教程-App即时导航
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何通过手机RosCore APP来即时导航
操作步骤:
-
打开RosCore APP
-
选择导航的地图
点击屏幕右上角“选择地图”的区域,选择一张地图
- 校准LEO机器人的位置
点击右下方的菜单,点击“校准位置”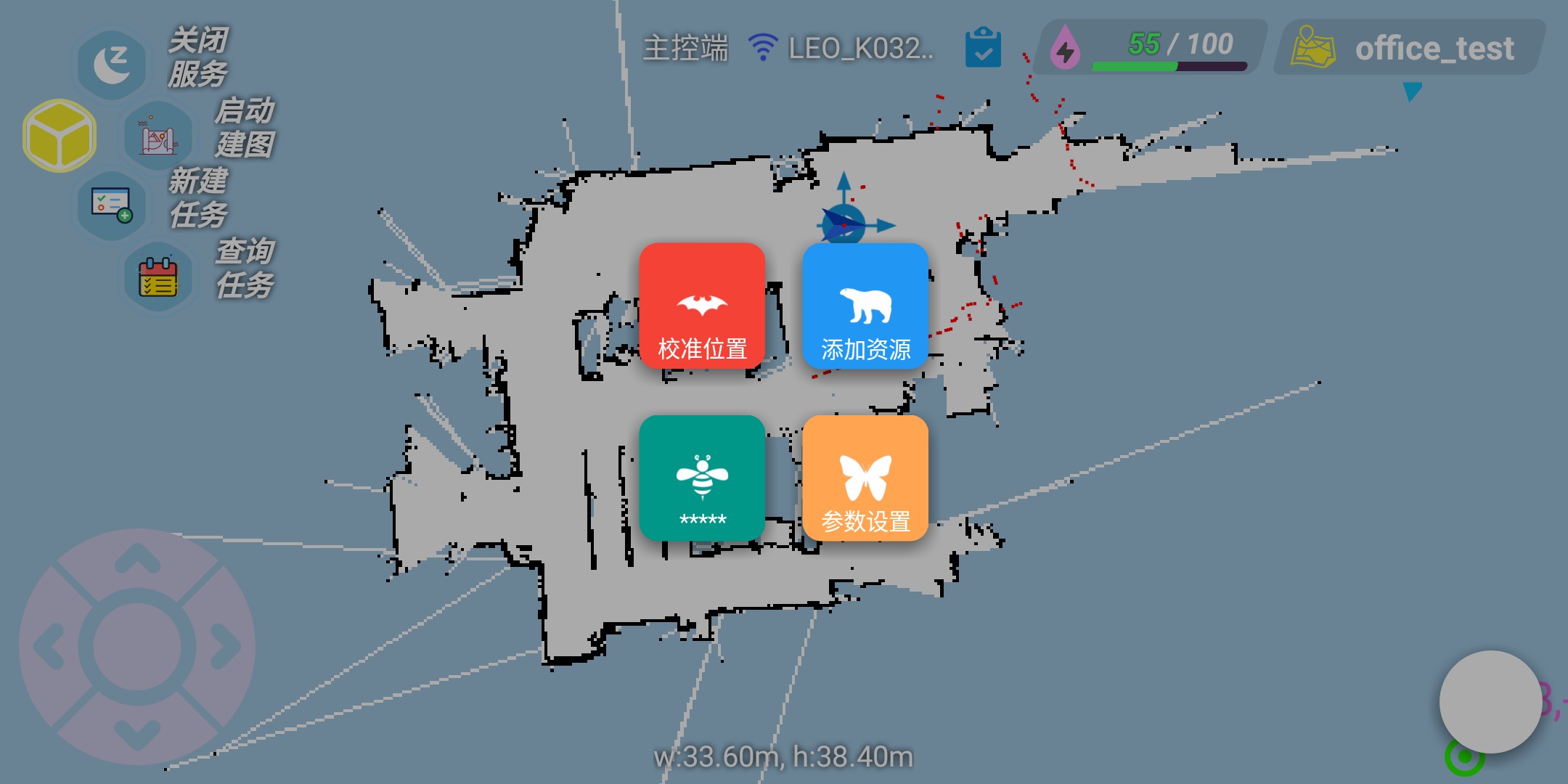
- 设置目标点
点击右下方的菜单,点击“添加资源”,点击“设点”,此时我们点击地图添加目标点(长按拖拽选点方向),当手指放开时,目标点位置和方向确定, 弹出对话框,提示输入要保存的目标点的名称。

- 新建任务
点击“新建任务”,填写任务名称,选择即时导航,选择前往的目标位置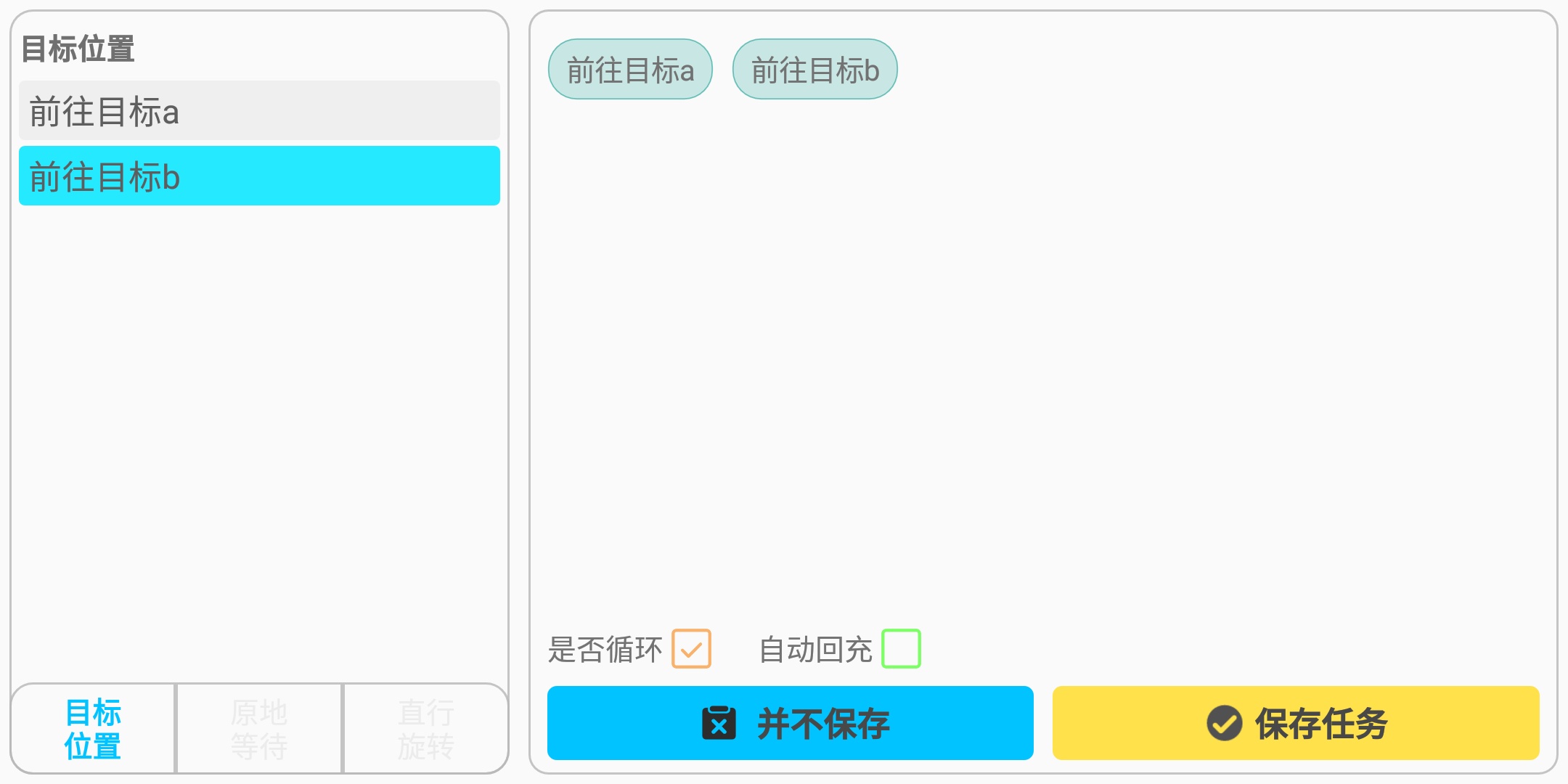
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=968135520&bvid=BV1sp4y1Q7xe&cid=193065547&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号