



















LEO机器人入门教程-RosStudio移动LEO
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
-
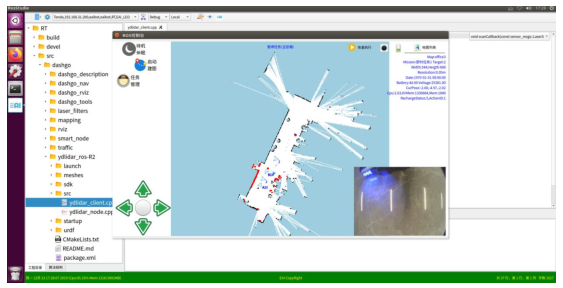
介绍如何通过RosStudio的ROS控制台移动LEO
-
ros 控制台主要的功能有:控制 ros 机器人移动,建图,导航、执行任务(导航到目标点)和驱动控制
操作步骤:
-
点击菜单栏的“工具”
-
选择“ROS控制台”
-
按住方向按钮不放,可以连续控制 robot 移动,中间按钮是停止移动
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号