



















LEO机器人入门教程-RosStudio连接LEO
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何配置连接LEO
操作步骤:
-
确定LEO机器人开机
-
将PC的Wifi连接到该LEO机器人
-
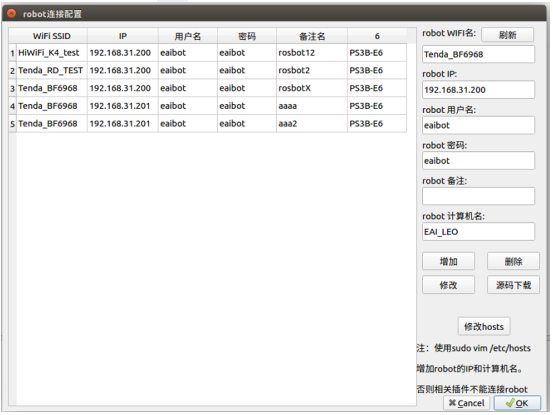
点击RosWinodws主界面的图标
 ,进入robot连接配置界面
,进入robot连接配置界面 -
输入机器人配置信息后,
- robot IP:192.168.31.200
- robot用户名:eaibot
- robot密码:eaibot
- robot备注名:R1(唯一的)
- robot计算机名称:EAI_LEO-
点击“增加”,输入本机root密码
-
点击“源码下载”,从LEO机器人上下载源码到本机
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号