



















LEO机器人入门教程-RosStudio编译源码
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何在RosStudio编译源码
操作步骤:
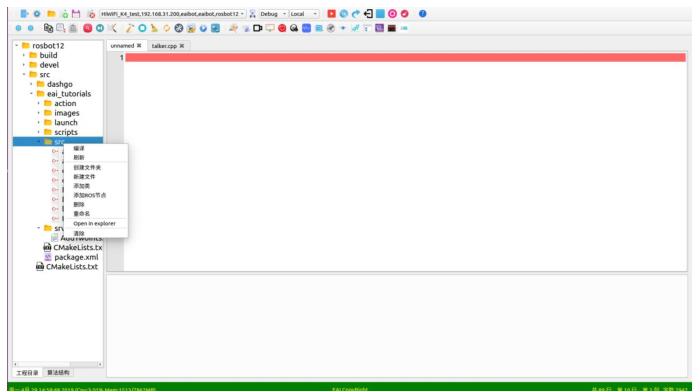
- 下载源码后,如下图所示,左边显示源码工程,右边上方是源码编辑区,右边下方是信息输出区
-
点击 build 菜单中的“build”功能
-
开始编译工程
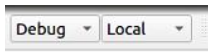
编译参数:
Debug/Release可选:Debug模式生成的可执行程序中包含gdb调试信息,Release模式中无
Local/Remote可选:Local是指宿主主机,Remote是指当前选择的robot机器人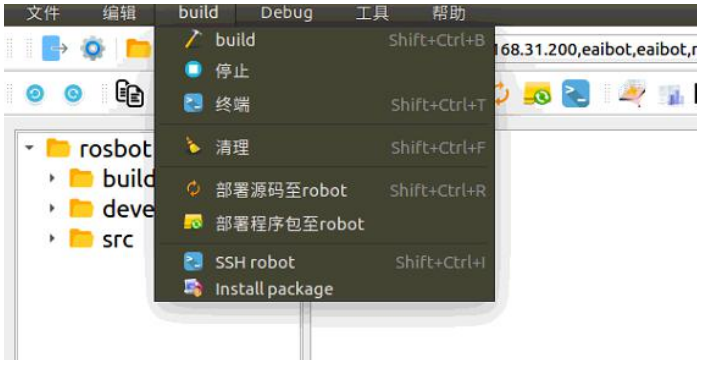
- 调试程序
- RosStudio 采用 GDB 调试,如果需要调试,必须先选择 Debug 模式编译源代码
- 编译成功后,打开需要调试的程序,在程序入口设置断点。点击 Debug 菜单的“开始调试”功能进入调试模式

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号