



















pixusv无人船入门教程-加速度校准
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
pixusv无人船入门教程-加速度校准
说明:
-
本教程介绍如何在Mission Planner地面站上校准加速度
-
测试环境:Mission Planner 1.3.62地面站 + pixhawk2.4.8 + + ArduRover V4.0.0
相关设备
- pixusv无人船套件 | 采购地址
操作步骤
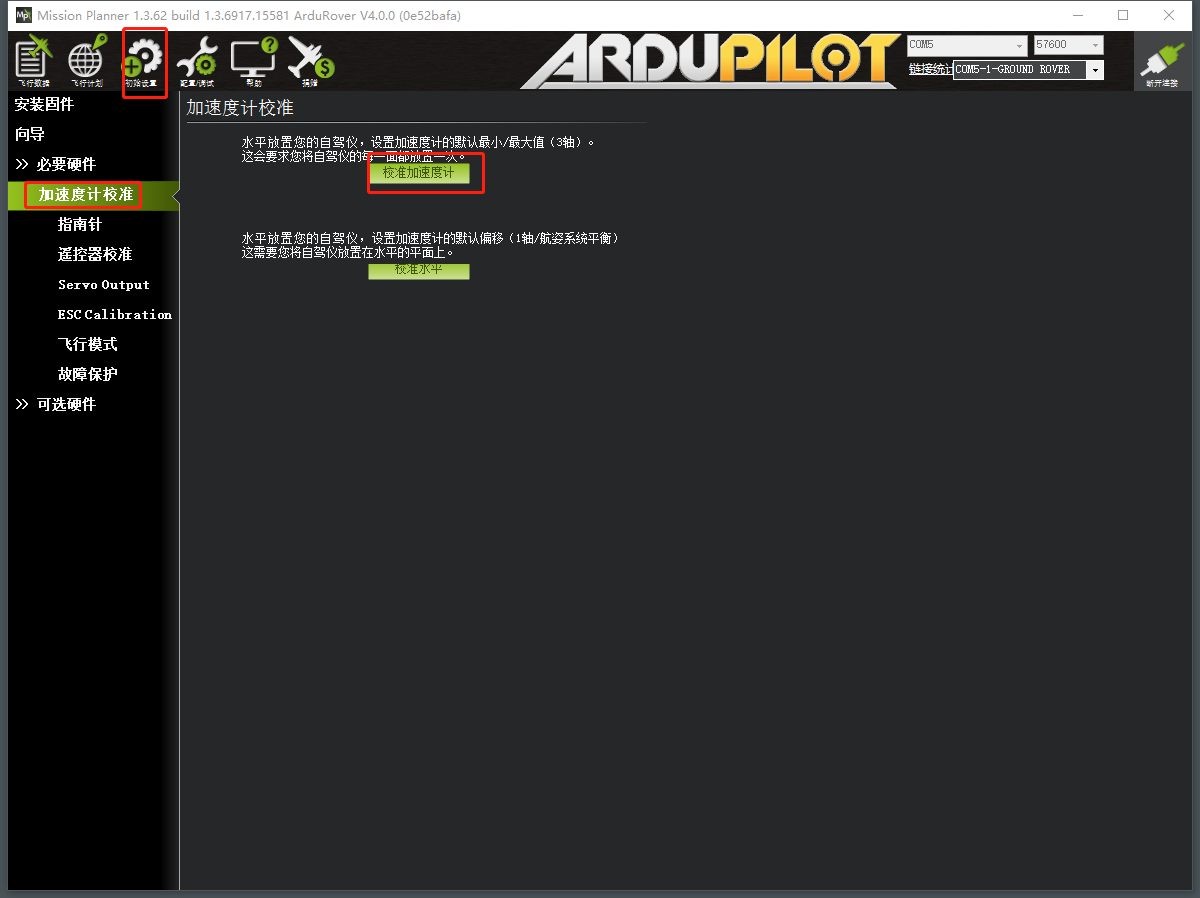
- 首先按飞控放平,箭头对向电脑屏幕,当点击
校准加速度按钮时,飞控RGB灯会红蓝闪,这时我们不可以去移动飞控,等红蓝闪过后就会提示开始校准

- 然后按照地面站提示,放置飞控水平,左,右,下,上
- LEVEL,放平,一定要确保飞控所在位置是平的,这步很重要
- LEFT,飞控向左
- RIGHT,飞控向右
- DOWN,飞控箭头向下
- UP,飞控箭头向上-
校准加速度过程,每个方位放置的时候不要太快,最好间隔1秒左右再换下一个方位,也不能太久,太久会超时。放方位要放端正,不要放个大概。并且记得飞控箭头要指向电脑屏幕
-
成功后提示
sucessful,失败会提示failed
注意:失败一般是飞控没有准确放置方位
- 成功后,飞控断电,重新连接。连接后,飞控放平,点击
校准水平
注意:这里校准完加速度成功后必须断电重新连接,然后做水平校准,必须做水平校准,pixhawk必须做水平校准,如果不做,飞一段时间可能会出现不水平
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号