



















pixusv无人船入门教程-相机测试
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
pixusv无人船入门教程-相机测试
说明:
-
本教程介绍如何在misson planner地面站上进行相机测试
-
测试环境:misson planner 1.3.62 + pixhawk 2.4.8 + ArduRover V4.0.0 + 乐迪AT9S + FIRELFLY 8SE相机
相关设备
- pixusv无人船套件 | 采购地址
操作步骤
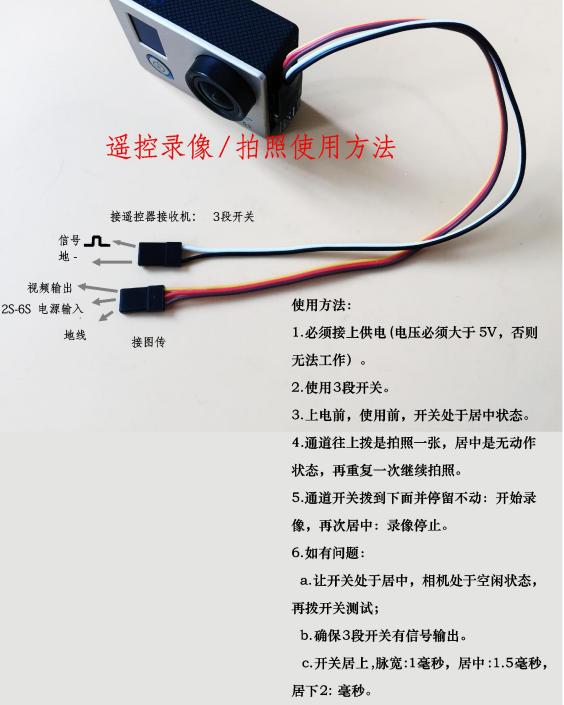
- FIRELFLY 8SE相机支持遥控拍照功能
-
将FIRELFLY 8SE的信号线接到pixhawk的
AUX OUT的第一个pin接口上,视频输出线接到图传osd上 -
使用pixhawk控制摄像头的方案有两种,一种是通过直接pwm控制来进行拍照录像,另一种是通过mp地面站默认的相机控制,但只能控制拍照
-
方法一
-
打开地面站->
配置/调试->全部参数表-> 搜索SERVO9_FUNCTION参数, 将参数值设置为57->写入参数 -
此时遥控器的通道7已设置为相机控制的开关,同时也在遥控器上也需要设置遥控器通道7设置为一个三段开关
-
打开遥控器-> 长按
Mode按钮进入基础菜单->辅助通道-> 将通道7设置为遥控器左上角的SwE三段开关

-
修改完后打开相机,切换遥控器的已设置为相机控制的三段开关测试是否正常控制相机拍照和录像
-
开关处于中位时,往上提一下再回中即可进行拍照;开关处于中位时,往下拉即可开始录像,保持开关朝下状态就可以一直录像,开关再上拉一下回中位时,即可结束录像
-
方法二
-
打开地面站->
配置/调试->全部参数表-> 搜索SERVO9_FUNCTION参数,将参数值设置为10-> 搜索RC7_OPTION参数,将参数值设置为9-> 搜索CAM_SERVO_ON参数,将参数值设置为1900-> `写入参数 -
然后跟上面的方法一样需要设置遥控器的通道7的键位
-
修改完后打开相机,切换遥控器的已设置为相机控制的三段开关测试是否正常控制相机拍照
-
开关往上提一下再回中即可进行拍照
注意:以上两种方法不能同时使用
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号