



















pixusv无人船入门教程-云台测试
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
pixusv无人船入门教程-云台测试
说明:
- 本教程介绍如何在misson planner地面站上设置飞行模式
- 测试环境:misson planner 1.3.62 + pixhawk 2.4.8 + ArduRover V4.0.0 + 乐迪AT9S + GOPRO3无刷3轴平台
相关设备
- pixusv无人船套件 | 采购地址
操作步骤
- 打开地面站->
初始配置->可选硬件->相机云台
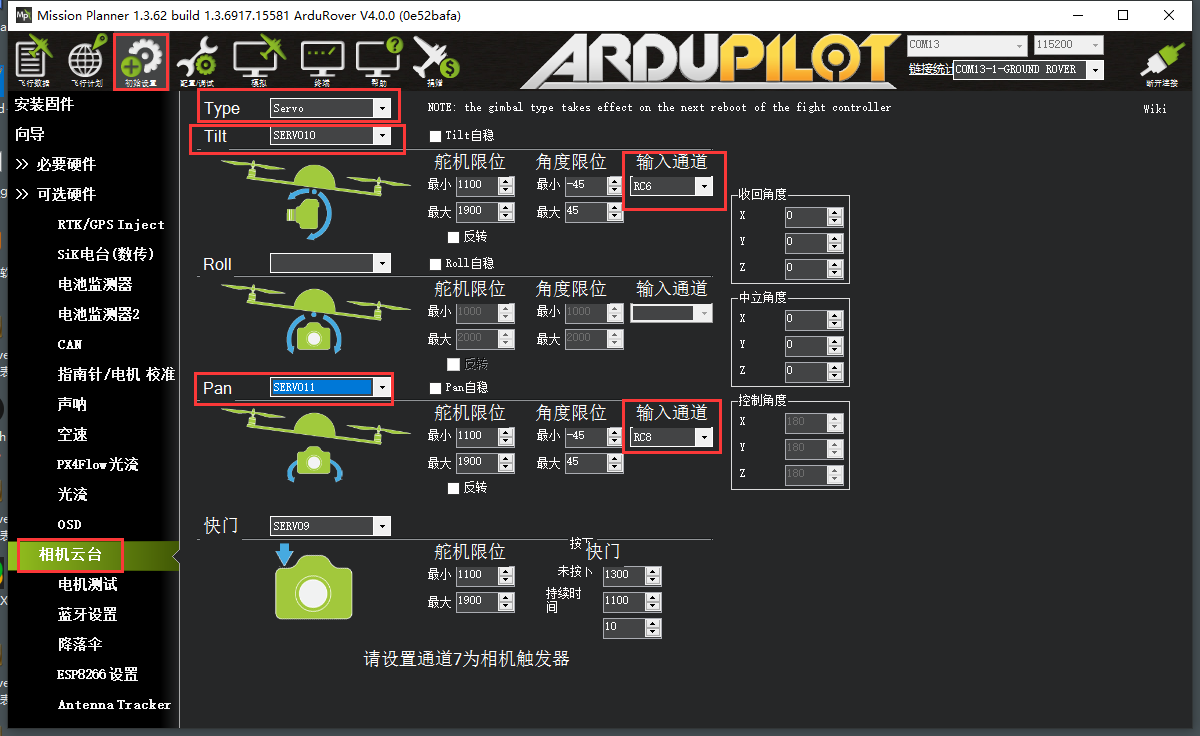
-
按照上图来设置云台舵机的端口和输入通道
-
通常情况下,只设置Tilt和Pan方向的舵机即可
-
修改后,需在遥控器上设置对应辅助通道
-
可以将控制云台的辅助通道设置成
VrA旋转开关和VrB旋转开关


纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号