



















Turtlebot3-waffle-pi入门教程#noetic版#-OpenCR安装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

Turtlebot3-waffle-pi入门教程#noetic版#-OpenCR安装
说明:
- 本教程主要介绍OpenCR驱动烧录noetic版的固件
- 测试环境:树莓派4B 2G + Ubuntu MATE 20.04 + ROS Noetic Ninjemys
相关设备
- TB3套件:采购地址
前提说明
-
对于在创客智造上购买的noetic版系统的tb3是已经烧录好固件,不需要重复安装
-
[TurtleBot] 同时其系统内置一键烧录稳定固件的脚本
$ ~/tools/firmware/noetic/loadRosNoeticFirmware.sh
Now the Noetic's firmware of waffle_pi will be download to the openCR.
aarch64
arm
OpenCR Update Start..
opencr_ld_shell ver 1.0.0
opencr_ld_main
[ ] file name : waffle_noetic.opencr
[ ] file size : 183 KB
[ ] fw_name : waffle_noetic
[ ] fw_ver : 1.2.6
[OK] Open port : /dev/ttyACM0
[ ]
[ ] Board Name : OpenCR R1.0
[ ] Board Ver : 0x17020800
[ ] Board Rev : 0x00000000
[OK] flash_erase : 1.08s
[OK] flash_write : 1.60s
[OK] CRC Check : 12AF870 12AF870 , 0.006000 sec
[OK] Download
[OK] jump_to_fw固件烧录
- [TurtleBot] 安装相关依赖包
$ sudo dpkg --add-architecture armhf
$ sudo apt-get update
$ sudo apt-get install libc6:armhf- [TurtleBot] 设置环境变量
$ export OPENCR_PORT=/dev/ttyACM0
$ export OPENCR_MODEL=waffle_noetic
$ rm -rf ./opencr_update.tar.bz2- [TurtleBot] 下载最新的固件
$ wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2
$ tar -xvf opencr_update.tar.bz2- [TurtleBot] 烧录固件
$ cd ./opencr_update
$ ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr测试
-
测试前需要预先组装Turtlebot3
-
将机器人放置在开阔区域的平坦地面上
-
对于测试,建议安全半径为 1 米
-
连接上电源后打开供电开关
-
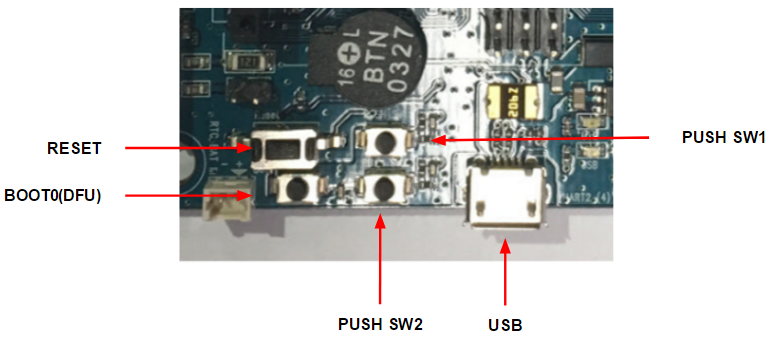
长按
PUSH SW 1数秒,正常情况下机器人向前移动30厘米 -
长按
PUSH SW 2数秒,正常情况下机器人将会原地旋转180度
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流