



















智能台灯LeLamp快速入门教程-硬件清单
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
文章说明
- 本教程主要介绍智能台灯lelamp所需要的硬件
相关设备
- LeLamp套件: 采购地址
主要硬件
| 硬件模块 | 说明 | 参考图 |
|---|---|---|
| 树莓派 | 支持树莓派3/4/5,本系列教程中默认使用树莓派3b+作为主控 |
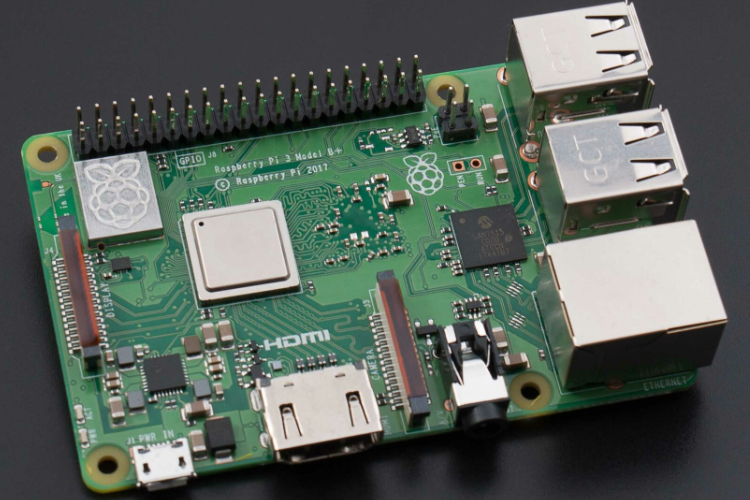
|
| ReSpeaker Hat | 麦克风模块,安装在树莓派上 |
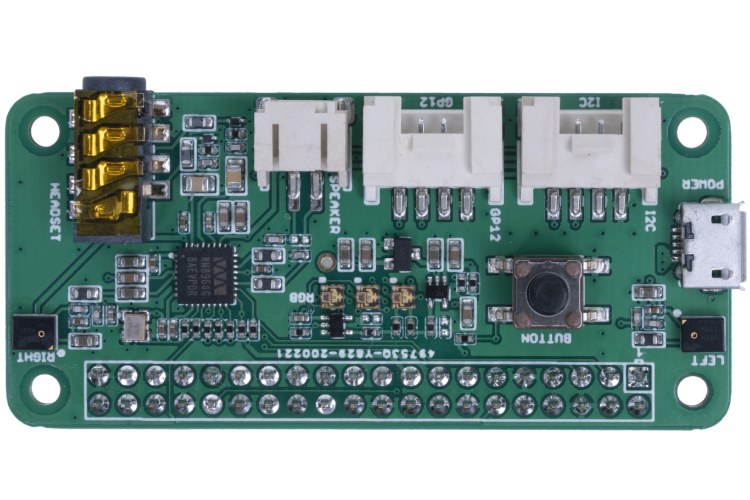
|
| 扬声器 | 音频输出;为了便于固定,还需要需要对灯罩的结构进行改动 |

|
| WS2812 RGB全彩LED模块 | 可以使用5v灯带,或者其他形状led;为了便于固定,还需要需要对灯罩的结构进行改动 |

|
| 飞特舵机 | 可以使用7.4v或12v舵机,但需注意电压输入,本系列教程中默认使用12v舵机 |

|
| 舵机驱动板 | 需根据使用的舵机类型来接入相应的电源 |

|
| 相机 | 可添加项 |
|
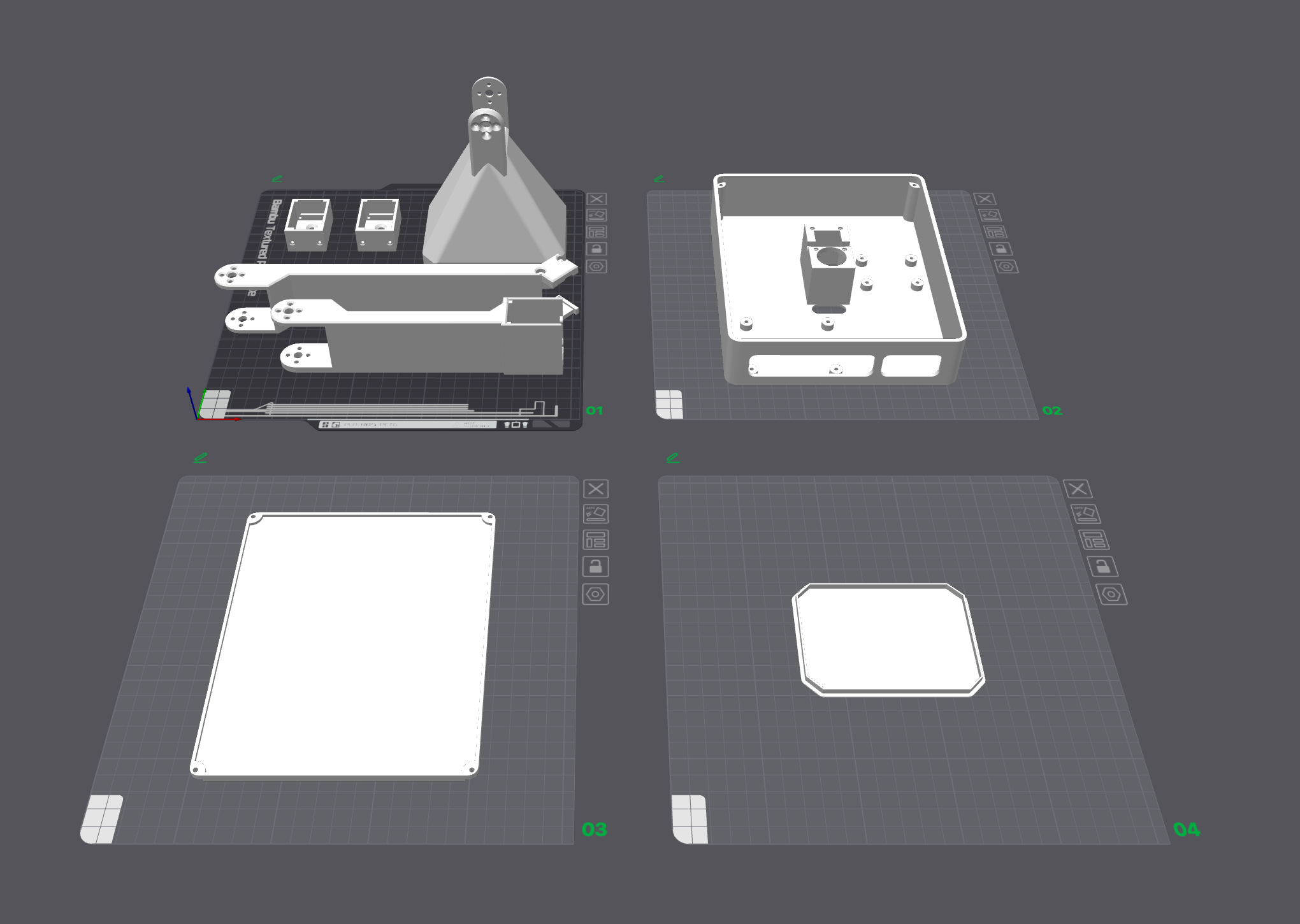
3D打印件

-
3d打印件的下载链接:https://github.com/EndlessLoops/LeLamp/tree/master/3D
-
在线查看3d模型:onshape
-
1 × 灯座(Lamp Base):固定舵机驱动板和树莓派
-
1 × 灯座盖(Lamp Base Cover):用于从底部盖住灯座
-
1 × 底座到肘部的灯臂(LampArm Base to Elbow):固定2号和3号舵机
-
1 × 肘部到手腕的灯臂(LampArm Elbow to Wrist):固定3号和4号舵机
-
2 × 俯仰舵机固定件(LampArm Pitch):包含用于舵机固定,比如2号和5号舵机
-
1 × 灯罩(Lamp Head):包含LED和扬声器
-
1 × 灯罩前盖(Lamp Head – Diffuser):用于扩散LED矩阵的光线
灯罩部分,可能需要基于你使用的led和扬声器来重新设计
- 您可以参考下图的摆放来进行打印
- 打印参数可以使用默认的配置,比如:
- 耗材:PLA/PETG
- 层高:0.2毫米
- 填充密度:15%
- 已启用支撑:是
- 支撑类型:树状纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号