



















Turtlebot仿真-测试仿真的Kinect
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
测试仿真的Kinect
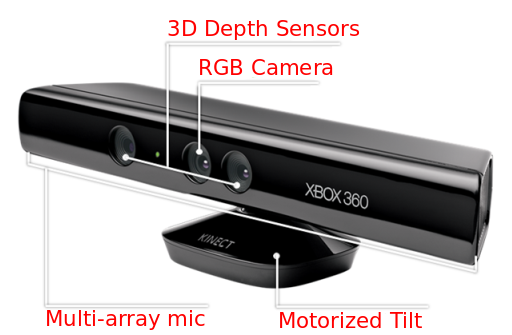
Kinect是什么?
- Kinect由三部分一起工作:RGB摄像头,深度传感器,和一个多阵列麦克风。
- turtlebot使用Kinect 3D看世界以及检测和跟踪物体。
先决条件
- 首先,确保你有OpenNI安装的软件包:
sudo apt-get install ros-indigo-openni-*- 你可以通过运行检查turtlebot激活三维传感器:
echo $TURTLEBOT_3D_SENSOR- 你已经正确激活3D传感器,如果你看到
Kinect。 - 如果你看到
asus_xtion_pro或别的东西,你需要设定一个值在.bashrc:
echo "export TURTLEBOT_3D_SENSOR=kinect" >> .bashrc- 或运行此命令在每一个新的终端:
TURTLEBOT_3D_SENSOR=kinect测试Kinect
- 注:本节将于稍后完成。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号