



















Turtlebot仿真-测试遥控
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
测试遥控
- 遥控操作允许你手动控制turtlebot。
- 有不同的方法:键盘、操纵杆、QT teleop、互动标记。
- 我们的教程将覆盖键盘和交互式标记方法。
在这一课中,我们将展示在终端的技巧:
-
使用上下箭头键可以在最后一次使用的命令之间切换。
-
使用
Ctrl+R组合调用reverse-i-search。键入字母,gaz例如,你会得到一个最近你的历史有gaz的。你可以按下Ctrl+R再去搜索以前的命令。当您看到正确的命令按Enter键执行它或右箭头选择此命令编辑。
我们展示使用这些技巧在教程视频的这个教训与解释。稍后我们将假设你知道它是如何工作的。
键盘
- 在Gazebo和Rviz正在运行,打开一个新的终端运行:
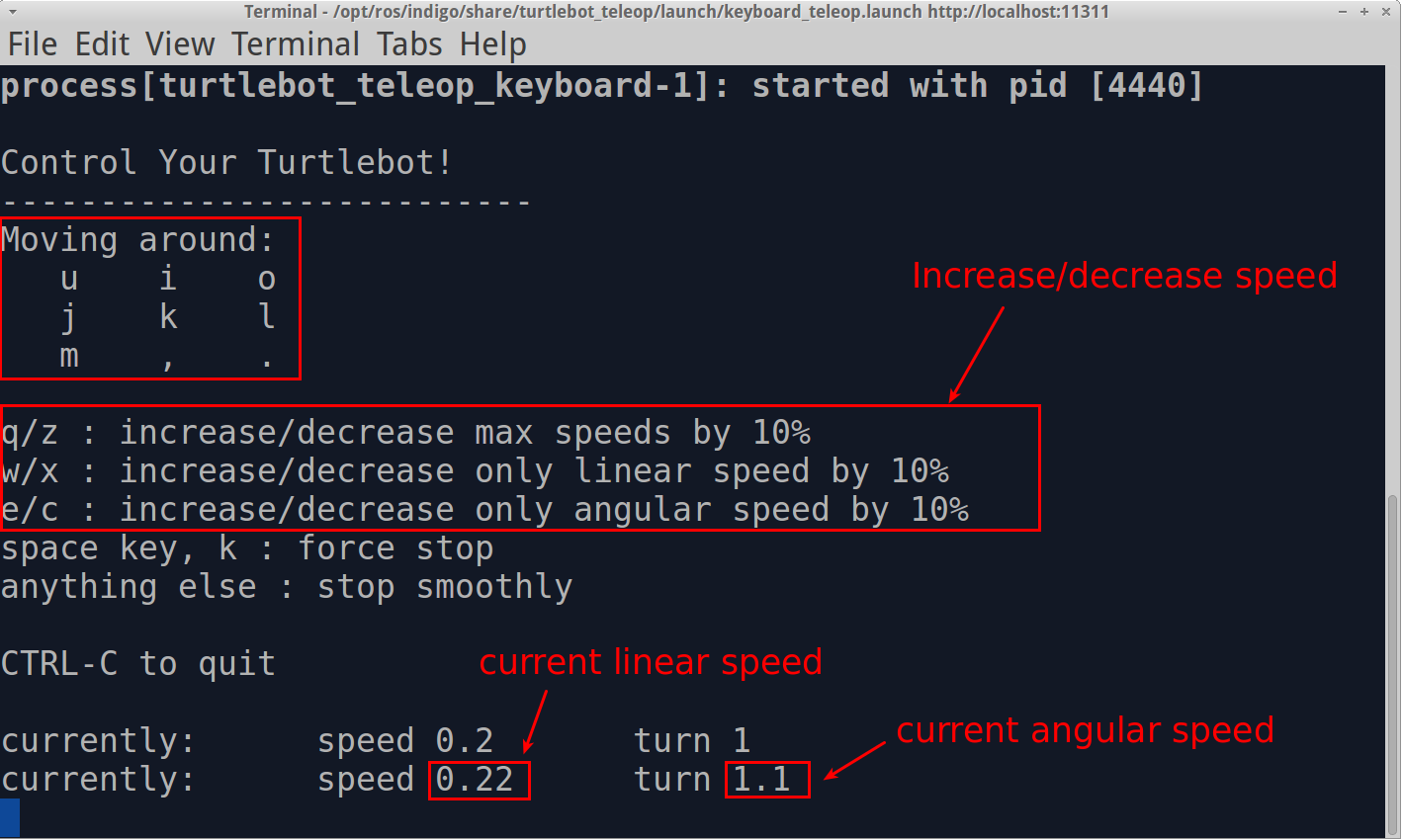
roslaunch turtlebot_teleop keyboard_teleop.launch- 注:与teleop发射终端必须主动所有的时间,否则你将无法操作turtlebot。
- turtlebot能前进、后退、旋转。你也可以增加/降低速度。
- 查看终端输出中的说明:
互动的标记
- 你可以控制turtlebot Rviz。
- 请检查已安装的交互标记包:
sudo apt-get install ros-indigo-turtlebot-interactive-markers- 在Gazebo和Rviz正在运行,打开一个新的终端运行:
roslaunch turtlebot_interactive_markers interactive_markers.launch下面的步骤来看看机器人的动作:
-
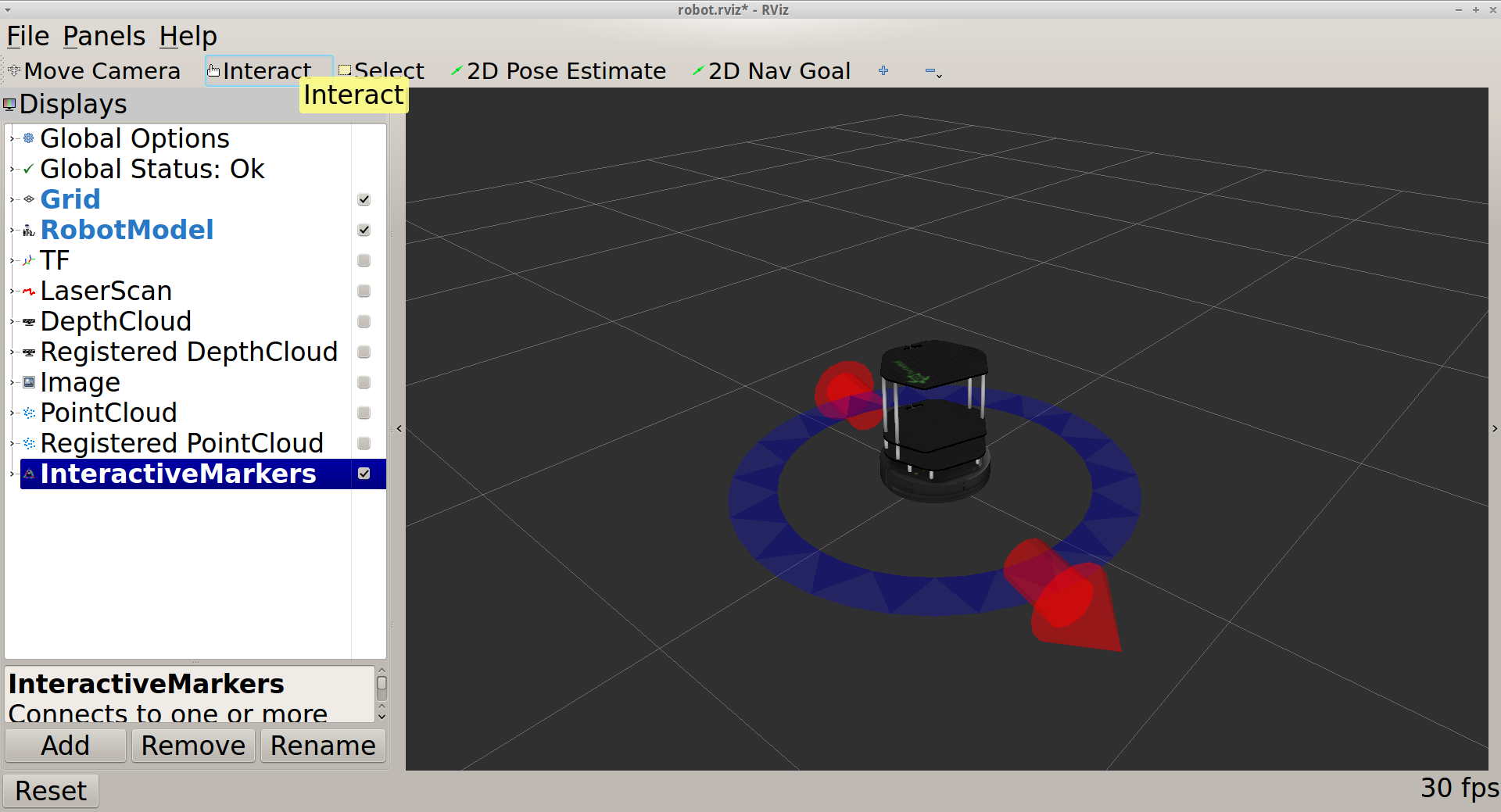
从左栏启用
Interactive Markers互动标记选项。 -
在屏幕顶部的工具面板中选择
Interact交互工具。你会看到蓝色的戒指和红色的箭。 -
拖动红色箭头来驱动turtlebot向前和向后。
-
拖蓝圈转动的turtlebot。
-
您可以拖动蓝色环旋转和驱动器同时。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号