



















ROS入门教程-更新ROS源
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS入门教程-更新ROS源
说明
- 鉴于国外的源不稳定或需要翻墙,很不方便,所以国内也搭建不错的源,这节演示如何愉快地使用国内的源
步骤
方法一:
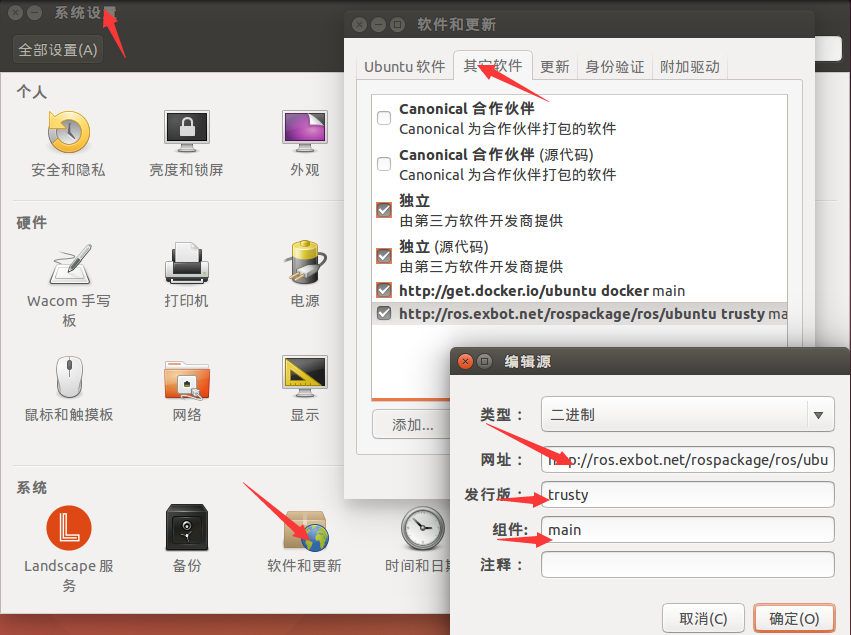
- 打开系统设置->点击“软件和升级”->点击“其他软件”->点击左下角“添加”按钮
- 网址栏写入:
http://ros.exbot.net/rospackage/ros/ubuntu/- 发行版写入:
trusty
- 组件写入:
main
- 效果图:
方法二:
- 命令下执行
sudo sh -c '. /etc/lsb-release && echo "deb http://ros.exbot.net/rospackage/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'- 最终会在/etc/apt/sources.list.d/ros-latest.list有这么一行
deb http://ros.exbot.net/rospackage/ros/ubuntu/ trusty main完成更新
- 命令行下执行更新
#更新源的软件包索引
sudo apt-get update
#升级已安装的软件包,此可忽略
sudo apt-get upgrade纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号