



















Kobuki硬件入门教程-红外传感器
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Kobuki硬件入门教程-红外传感器
说明:
- 介绍如何增加红外传感器
Kinect的限制:
-
作为避障,传感器Kinect有一些限制:
- 窄fov(58°x 43° 水平x垂直)
- 死亡区在第一个45厘米
- 无法检测玻璃墙
- 无法检测到抛光的金属表面
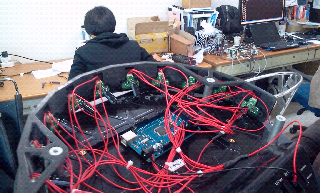
waiterbots处理:
- 我们在的waiterbots处理这增加了11个红外传感器半环,指向12度向下。
- 传感器型号:Sharp GP2Y0A21YK
- 电源:Kobuki的5V,1A
- 传感器读数:Arduino MEGA 2560
- PC接口:Arduino自定义固件 - Bosch adc_driver (github)
- 安装:3D打印框架。
原理:
- 传感器的模拟输出由Arduino板读取,而对于电源和地,它们连接到Kobuki的5V 1A电源。
- 将多个传感器连接到同一电源会使得当没有障碍物时读数很嘈杂。
- 解决方案是在每个传感器上放置去耦电容。
- 对于Arduino的接口,我们使用Bosch adc_driver。
- 一个有趣的问题有时候出现在某个特定角度(约30度)的角落:传感器得到假的读数,不知道为什么。
- 我们只是继续这个,因为不是一个常见的问题。
不同的安装支架:
- 可供下载和打印在我们的文件服务器:
- 水平安装的MaxBotix的LV-Maxsonars
- 水平安装的Sharp红外传感器
- 12度向下指向锋利的红外传感器
图示:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号