



















Kobuki硬件入门教程-陀螺仪
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Kobuki硬件入门教程-陀螺仪
说明:
- 介绍陀螺仪的相关信息
规范
- 3轴数字陀螺仪
- 制造商:STMicroelectronics
- 部件名称:L3G4200D
- 测量范围:±250度/秒
- 偏航轴在出厂时在±20度/秒至±100度/秒的范围内校准
性能
(1)就地旋转测试
-
图示:
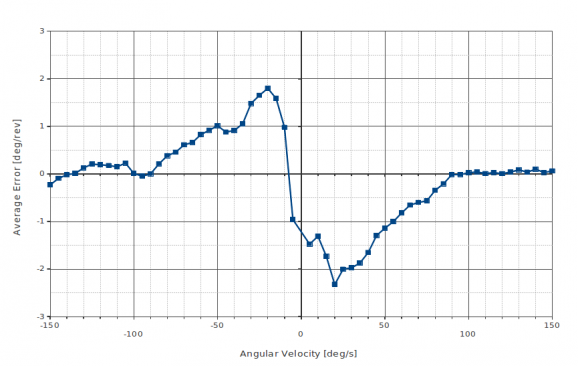
-
该图显示了当机器人以给定速度旋转时,陀螺仪每转的平均航向误差
(2)方形路径测试
- 图示:
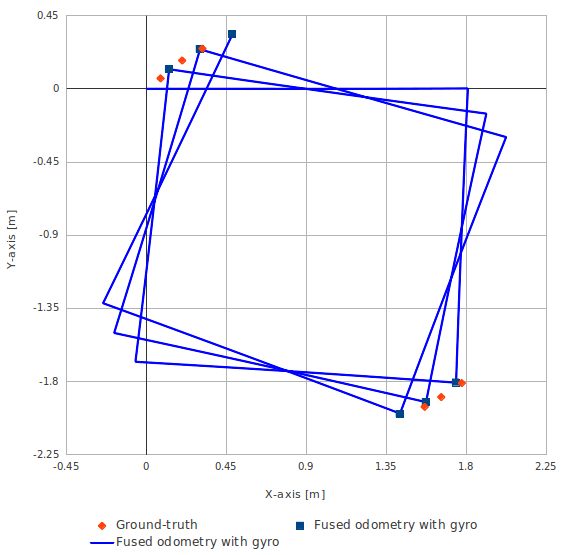
- 此图形显示了当机器人沿着正方形路径移动时,融合测距与陀螺仪的位置误差。
- 机器人在线段上以0.1m/s移动,在角上以30deg/s旋转。
| 方形路径的匝数 | 角误差[deg] |
| 0.5 | 0.47 |
| 1.5 | 1.99 |
| 2.5 | 3.18 |
- 该表显示了当机器人到达起点(0.0,0.0)对角线对角的角度误差
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号