



















PX4开发指南-8.1.统一的基础代码
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
机型概述
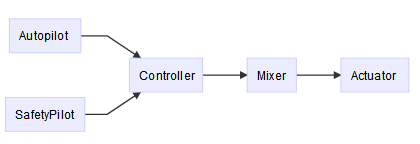
- PX4系统是模块化的架构,这使得它对所有的机器人类型都可以使用同一个代码库。
基本设备
-
在机型部分所用到的硬件包括以下基本设备:
-
1个Taranis Plus遥控器(或者其它有PPM/S.BUS输出的设备),用于保证安全飞行。
-
1个地面站
-
- Samsung Note 4或者同类型的较新的Android平板
- iPad(需要无线遥测适配器)
- 任何MacBook或者Ubuntu Linux笔记本- 1台in-field电脑(用于软件开发者)
- MacBook Pro或者Air,至少OS X 10.10
- 现代Ubuntu Linux笔记本,至少14.04-
安全眼镜
- 用于多旋翼危险测试
-
PX4应用范围很广,但是对于新手开发者而言,从标准配置做起会更好,1个Taranis Plus遥控器,1个Note 4平板就可以组成一套便宜的套件。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号