



















PX4开发指南-12.1.1.SF1XX lidar
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4开发指南-12.1.1.SF1XX lidar
Lightware SF1XX 激光雷达设置
-
本页面向你展示如何去设置一个下面几种类型的激光雷达:
-
SF10/a
-
SF10/b
-
SF10/c
-
SF11/c
-
-
硬件驱动仅适合于飞控板上I2C的连接方式。
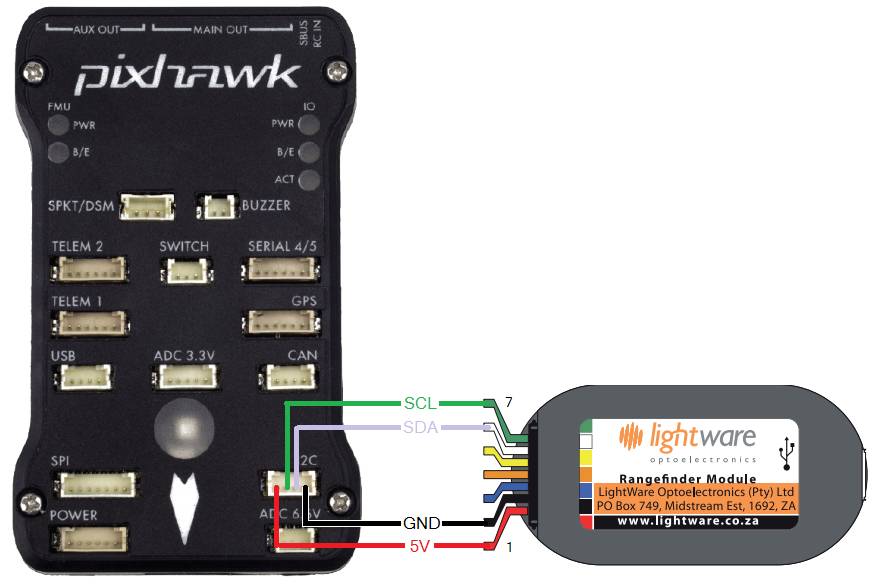
激光雷达设置
-
首先通过USB连接传感器(内含USB转串口),运行终端,并按空格键检查I2C地址是否等于
0x66。 -
新版本飞控板已经预先设置为
0x66,而老版本设置的0x55地址与rgbled模块地址相冲突。
PX4设置
-
通过
SENS_EN_SF1XX参数选择激光雷达模型,然后重启。参数SENS_EN_SF1XX具体定义如下:-
0 lidar disabled
-
1 SF10/a
-
2 SF10/b
-
3 SF10/c
-
4 SF11/c
-
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号