



















Kaya-AI机器人教程-硬件组装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Kaya-AI机器人教程-硬件组装
说明:
- 介绍如何组装Kaya-AI机器人
步骤:
- 为舵机设置ID
- 首次购买时,Dynamixel电机都将被分配ID“1”,并且必须在Kaya上连接之前为其分配唯一的ID并进行正确配置。
- 此过程需要USB串行适配器(USB2AX或U2D2),外部12V电源(Kaya上的12V DC-DC转换器)及运行PC上的RoboPlus v1软件。
- RoboPlus v2不适用于MX-12W。 请访问http://www.robotis.us/roboplus1/下载RoboPlus v1应用程序。
- 您可以在组装完其余的Kaya后完成此步骤。
- 请注意,您应该一次只连接一个电机以避免重复ID。
- 分配ID的步骤:
A.启动RoboPlus v1应用程序。 B.将USB串行转换器连接到桌面。 C.将每个Dynamixel电机连接到串行适配器。 D.将Dynamixel电机连接到外部(12V)电源。 E.在RoboPlus v1应用程序中启动Dynamixel Wizard。 F.打开端口(顶部菜单)以检测连接的电机。 G.单击正确的电机,分配下面的ID#和车轮模式。 单击“应用”
左:ID 1
后方:ID 2
右:ID 3H.对每个电机重复步骤G,并相应地注释每个电机的ID。
- 安装舵机
- 将Dynamixel MX-12W电机套件中的4个M2螺母从所有侧面的喇叭(伺服头)向上插入第二个插槽。用力按压固定。
- 使用Dynamixel MX-12W电机套件中的4个M2螺钉将每个电机安装到电机底板(Kaya_Motor_Bottom_Plate)中。

- 组装内轮毂
- 将18mm M3支座插入轮毂背面的六角孔(Kaya_Wheel_Hub_Inside)。
- 使用Dynamixel MX-12W电机套件中的4个M2螺钉,将集线器(Kaya_Wheel_Hub_Inside)固定到Dynamixel的喇叭上。
- 均匀拧紧。 小心不要过度拧紧。
- 重复每个电机。

- 切割和压接电源接线
- 将9节18AWG(4根黑色,5根红色)线切成一定长度,并从两端剥去绝缘层(3-5mm)。
- 使用合适的压接工具根据工作台连接连接器。 注意确保所有连接器都是机械安全的,并保持良好的电气接触。
- 切割和压接接线时,请参阅下图,表格和组装说明。
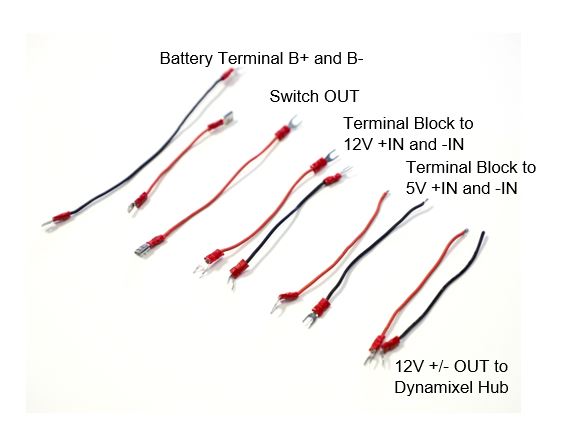
| Wire# | Color | Length | Terminal 1 Connector | Terminal 1 Connection | Terminal 2 Connector | Terminal 2 Connection |
| 1 | Black | 140 mm | Male Spade | Battery B- | Fork Spade | Terminal Block B- |
| 2 | Red | 80 mm | Male Spade | Battery B+ | Female Spade | Switch IN |
| 3 | Red | 140 mm | Female Spade | Switch OUT | Fork Spade | Terminal Block B+ |
| 4 | Black | 120 mm | Fork Spade | Terminal Block B- | Fork Spade | 12V Regulator -IN |
| 5 | Red | 120 mm | Fork Spade | Terminal Block B+ | Fork Spade | 12V Regulator +IN |
| 6 | Black | 120 mm | Fork Spade | Terminal Block B- | Bare Wire | 5V Regulator -IN |
| 7 | Red | 120 mm | Fork Spade | Terminal Block B+ | Bare Wire | 5V Regulator +IN |
| 8 | Black | 120 mm | Fork Spade | 12V Regulator -OUT | Bare Wire | Dynamixel Hub -IN |
| 9 | Red | 120 mm | Fork Spade | 12V Regulator +OUT | Bare Wire | Dynamixel Hub +IN |
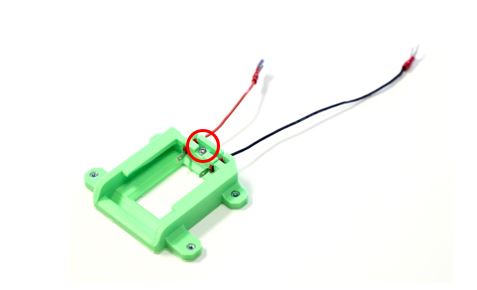
- 将电池端子连接到电池座
- 将电池端子电缆(电线#1和#2)放入电池座(Kaya_Battery_Holder)的插槽中,电极板彼此相对,如下图所示。
- B +(红线)应位于最靠近电池座切口的槽中。 用力按压压接顶部,使其正确固定在通道中。

- 使用端子支架(Kaya_Battery_Terminal_Holder)和M3 x 8mm螺钉固定电缆。
- 检查电池的对齐情况,并使用钳子调整拨片,直到它们对齐并正确就位。
- 为避免在电池端子之间造成电气短路,请用电工胶带覆盖任何松动的电线末端。
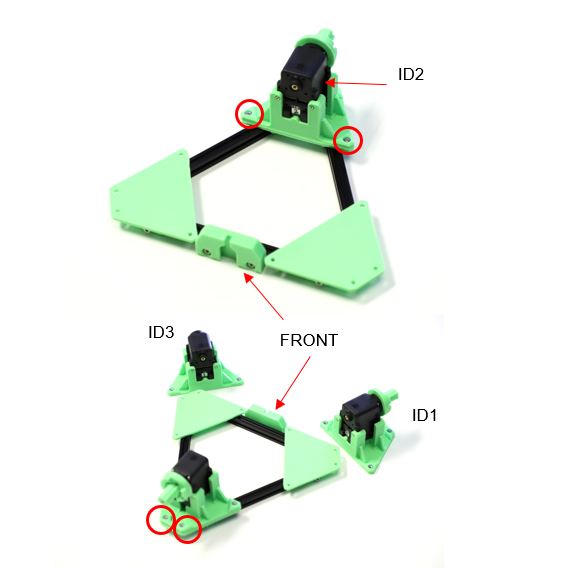
- 组装框架
-
使用4个MakerBeam螺母和每个角上的4个M3 x 5mm螺钉将每个电机顶板(Kaya_Motor_Top_Plate)连接到MakerBeams。
-
首先将MakerBeam螺母滑入通道,每侧2个,然后在用螺钉固定之前与孔对齐。

-
在两个电机顶板(Kaya_Motor_Top_Plate)之间,安装Kaya_Pusher_Mount,记住在连接第二个电机顶板之前将螺母滑入到位。
-
组装整个三角形并均匀拧紧所有12个螺钉。
-
出于本程序其余部分的目的,带有推进器支架的一侧(Kaya_Pusher_Mount)是Kaya的前部。

- 将底板组件连接到电机顶板/ MakerBeam框架
- 将每个电机底板(Kaya_Motor_Bottom_Plate)组件以正确的配置连接到框架。 标有Dynamixel ID 2的电机组件应位于推进器支架(Kaya_Pusher_Mount)的对面,其他两个电机组件位于相邻的两侧。
- 将4个M3螺母插入电机底板(Kaya_Motor_Bottom_Plate),并用4个M3 x 8mm螺钉连接到电机顶板(Kaya_Motor_Top_Plate)。 重复每个电机。 均匀拧紧所有12个螺丝。
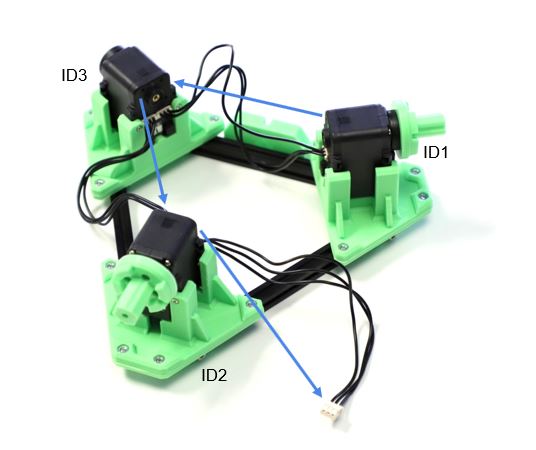
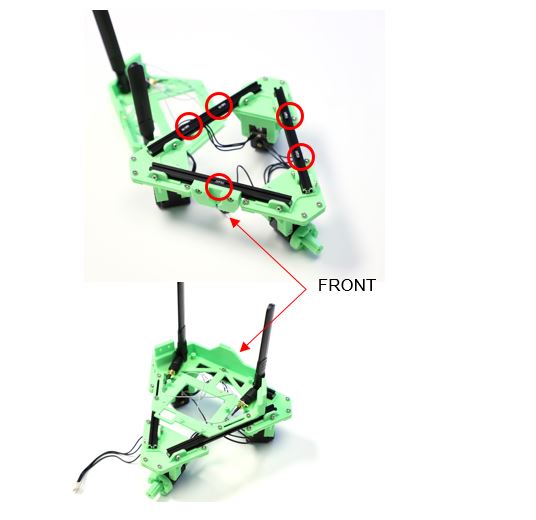
- 舵机连线
- 当所有Dynamixel MX-12W伺服电机都已分配ID(参见步骤1)并安装在适当的位置时
- 使用Dynamixel MX-12W电机套件中的电缆连接它们以进行电源和数据传输。
- 所有伺服电机共享公共电源和数据线,并使用电机ID寻址的数据包进行通信。
- 因此,它们可以按任何顺序连接,甚至可以单独连接到Dynamixel Power Hub。
- 对于电缆管理目的,最佳连接顺序为1 - 3 - 2
- 安装IMU
- 将公头插针焊接到IMU板上。 将它们的长端排列在电路板的标签面上。 3V3,GND,SCL和SDA的引脚将用于I2C通信。
- 如图所示,使用2个M2 x 6mm螺钉将插头板朝向电子设备托架中心(Kaya_Electronics_Bay)安装IMU板。

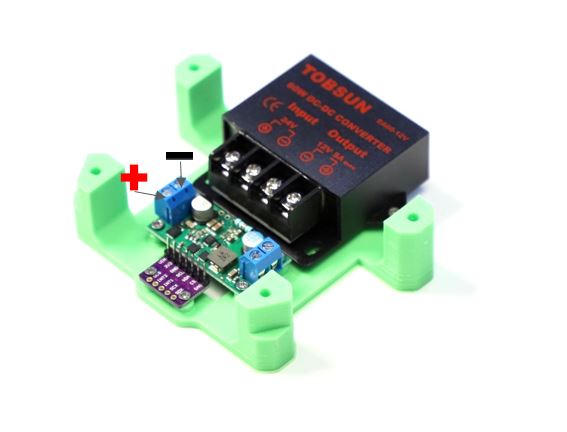
- 安装直流稳压器
- 将蓝色螺丝端子焊接到Pololu 5V 6A DC-DC降压稳压器上。
- 使用6 M2 x 6mm螺钉将5V稳压器和12V稳压器固定到电子设备托架(Kaya_Electronics_Bay)。
- 确保这些稳压器的方向与图像匹配,在5V稳压器的IN +/-与12V稳压器的IN +/-同侧。
- IMU连线
-
将母对母电气跨接线连接到IMU引线(3V3,GND,SCL和SDA)。
-
记下每个引脚上连接的颜色线,这些引线稍后将连接到Jetson Nano GPIO引脚。
-
可选地,在集管的中间侧使用少量热胶将IMU针头固定到位。

-
有关详细信息,请参阅将BMI160 IMU连接到Jetson Nano或Xavier。
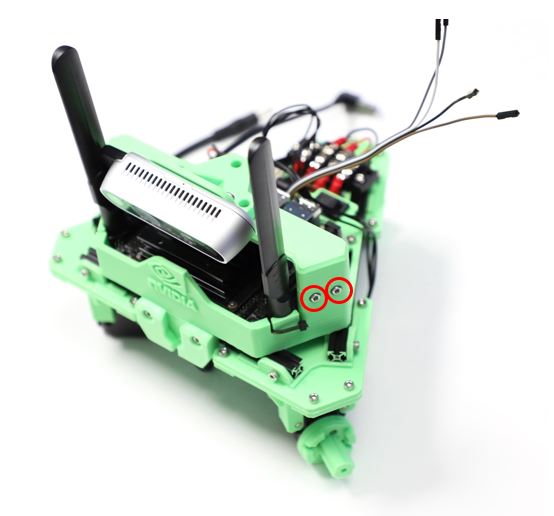
- 安装WIFI天线
- 使用SMA螺钉端子将天线电缆连接到Wi-Fi天线。
- 将天线弯曲90度,并将它们安装在基座两侧的指定通道(Kaya_Nano_Base)中。
- 如图所示,使用扎带将天线固定到位。

- 将Jetson Nano Base连接到框架上
- 定位Jetson Nano Base(Kaya_Nano_Base),使NVIDIA徽标面向Kaya推杆座(Kaya_Pusher_Mount)。
- 将1个MakerBeam螺母滑到前MakerBeam的顶部,将2个滑到另外两个MakerBeams上。
- 首先固定前螺钉,然后将另外4个固定到侧梁上。 均匀拧紧所有螺钉。
- 将电池底盘组件连接到新的框架组件
- 将电子托架(Kaya_Electronics_Bay)堆叠在电池座(Kaya_Battery_Holder)顶部,平面朝上,直流调节器正面朝上。
- 将电子设备托架(Kaya_Electronics_Bay)的顶部与底座(Kaya_Nano_Base)的底部接触,使其位于电机之间的框架组件的中心。
- 确保没有夹住电缆。
- 检查前部动态像素电缆是否位于12V电源顶部。
- 然后使用4个M3 x 35毫米螺钉穿过底座(Kaya_Nano_Base)并将其连接到电池座中的4个M3螺母(Kaya_Battery_Holder)。

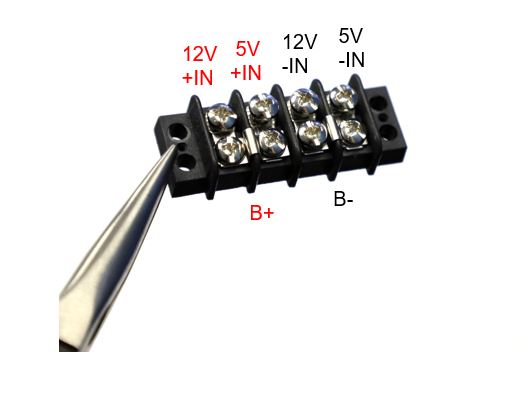
15.准备接线端子
- 使用端子块跳线,将最左边的两个端子块连接在一起,然后连接两个最右边的连接。
- 这样可以将电池B +和B-连接到12V和5V DC稳压器。
- 在进行电气连接时参考组装说明,如以下步骤所述。
- 安装电源开关
-
从电池座中找到B +线(#2,红色),然后通过底座后部的开关孔(Kaya_Nano_Base)将其送入。 将插板连接器连接到中间开关端子。
-
将第二根电线(#3,红色,母锹连接到叉形锹)连接到外部开关端子。
-
调整开关的方向,使两个端子最靠近Kaya的内部。 如图所示,略微弯曲连接的端子线,使其面向Kaya的外部。 这有助于他们在安装后清除电池座(Kaya_Battery_Holder)。
-
将未连接的叉形铲连接器穿过开关孔并朝向Kaya的后部。
-
小心避免挤压电线,将开关按下到位。
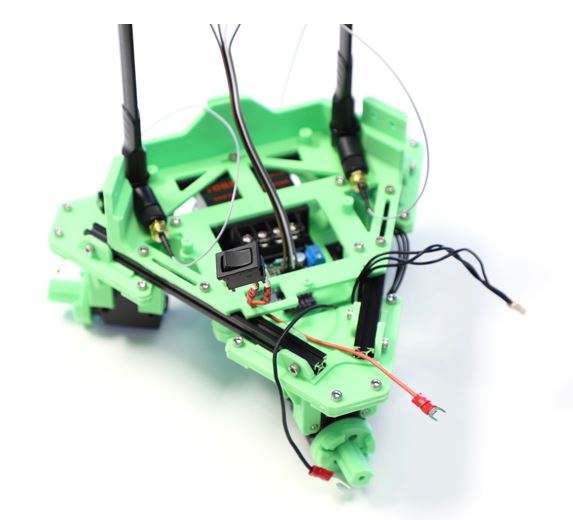
- 连接稳压器输入
- 将B线(#1,黑色)从电池和B +线从开关(#3,红色)拉到Kaya的后部。
- 将这些电线的叉形连接器连接到接线盒,参考组装说明。
- 这些电线应整齐地布置在接线盒下方的MakerBeams之间。
- 使用叉形铲连接器将电线#4至#7连接至接线盒。
- 参考照片和电缆订购的装配说明。 将叉子连接到接线端子后向下弯曲,以便更好地贴合。

- 将其他电缆塞入底座(Kaya_Nano_Base)下方并插入电子设备托架(Kaya_Electronics_Bay)。
- 将#4和#5电缆连接到12V稳压器IN +/-,将电缆#6和#7连接到5V稳压器IN +/-。
- 请注意,12V调节器上的连接按顺序排列+ IN,-IN,-OUT,+ OUT,如组装说明中所示。
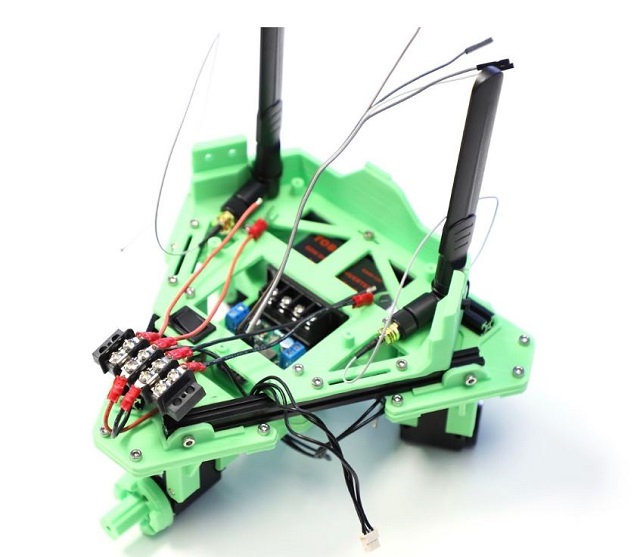
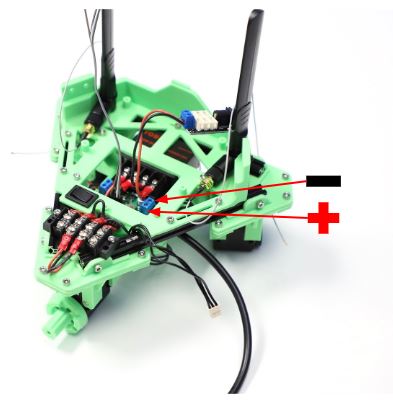
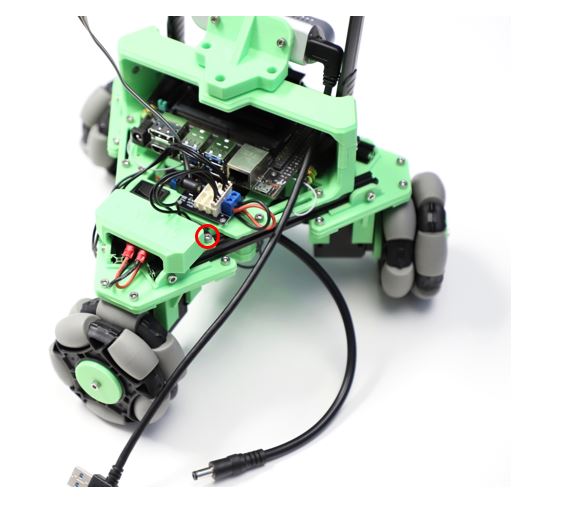
- 连接稳压器输出
-
将一个2.1 x 5.5mm的公插头尾纤连接到5V稳压器外螺纹端子上。 请注意,棕色线是+,蓝线是 - 。 (中心正极性。)
-
将#8和#9电缆的叉形连接器连接到12V稳压器OUT-和OUT +。
-
将裸线末端连接到Dynamixel Power Hub螺丝端子,将电缆穿过底座或围绕底座(Kaya_Nano_Base)。
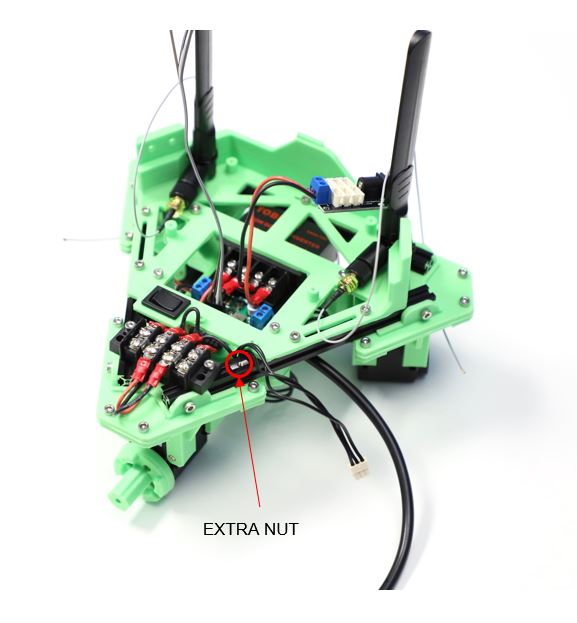
- 安装接线端子
- 使用3个MakerBeam螺母和2个M3 x 8mm螺钉将接线盒安装到框架上。
- 在接线盒右侧前面滑动一个额外的螺母,以便以后使用接线盒盖(Kaya_Terminal_Block_Cover)。
- 仅使用前面的一组安装孔,尽可能远地将接线盒放置在后面。
- 安装Dynamixel Power Hub
- 将松散的Dynamixel电缆从伺服电机ID3连接到Dynamixel Power Hub上的任何端口。
- 使用另一个Dynamixel线缆将USB2AX连接到Dynamixel Power Hub。
- 使用2个M2x6螺钉将Dynamixel Power Hub安装到底座(Kaya_Nano_Base),如下所示。

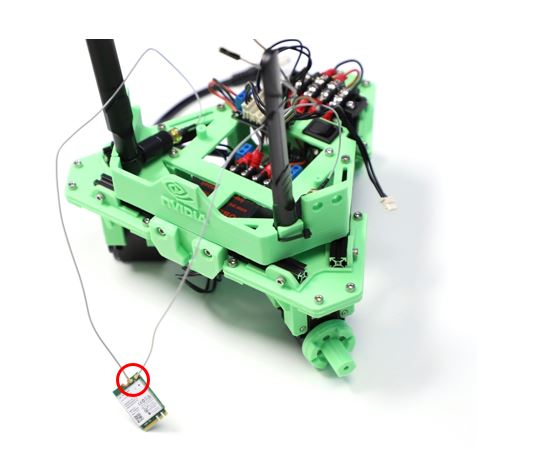
- 连接wifi天线网卡
- 将小型天线电缆连接器(U.FL / AMC / UMCC / IPX)连接到Wi-Fi卡。
- 这些应该在垂直压力下卡入到位,但可能难以使用。
- 将卡放在平坦的表面上以获得最佳杠杆可能会有所帮助。
- 注意不要损坏卡上的连接器,并尽可能避免断开连接并重新连接。
- 安装无线网卡
- 首先卸下2个十字螺钉,然后卸下2个侧面的闩锁,从载板上卸下Jetson Nano模块。
- 连接Wi-Fi卡并使用附带的螺丝固定。
- 重新连接并固定Jetson Nano模块的载板。
- 安装nano
- 使用4个M2 x 6mm螺钉将Jetson Nano Developer Kit安装到Kaya_Nano_Base,如下图所示。
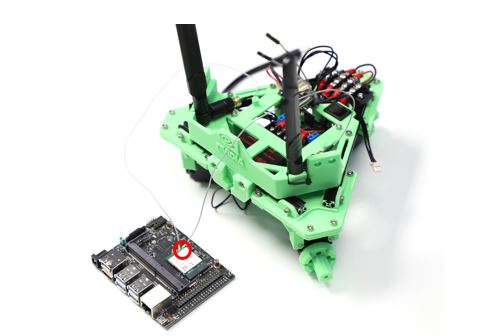
- 对于电缆管理,将天线电缆卷绕在Jetson Nano下面可能会有所帮助。 - 在载板上标有“ADD JMPR TO DISABLE USB PWR”的插头引脚上添加跳线,以便通过5V桶式插孔连接为Jetson Nano供电。
- 安装相机
- 使用2个M3 x 5mm螺钉将RealSense相机连接到Kaya_Realsense_Mount。
- 使用3个M3 x 8毫米螺钉和3个M3螺母将摄像机支架(Kaya_Realsense_Mount)连接到摄像机桥(Kaya_Realsense_Bridge)。
- 将USB-C电缆连接到RealSense摄像头。


- 将RealSense Bridge连接到Jetson Nano Base
- 使用4个M3 x 8mm和4个M3螺母将摄像机桥(Kaya_Realsense_Bridge)连接到底座(Kaya_Nano_Base)
- 组装轮子
-
使用1个M3 x 35毫米螺钉将每个Omni轮连接到外轮毂(Kaya_Wheel_Hub_Outside),车轮本身,然后进入内部轮毂(Kaya_Wheel_Hub_Inside)。 小心不要过度紧张。
-
螺纹锁固器可用于防止这些紧固件松动。

- 安装接线端子盖
- 使用步骤19中的额外MakerBeam螺母,使用M3 x 5mm螺钉连接端子块盖(Kaya_Terminal_Block_Cover)。
- 将电缆连接到Jetson Nano
-
将RealSense相机和USB2AX连接到Nano上的前2个USB连接器。
-
确保电源开关未设置为“ON”。
-
将桶形插头电缆从接线盒盖(Kaya_Terminal_Block_Cover)后面的5V稳压器布线,然后插入Jetson Nano的桶式插孔输入端。
-
切勿将5V桶形插头电缆连接到Dynamixel Power Hub的桶形插孔输入。 这可能会对电压调节器造成不可逆转的损坏。
-
将IMU的跳线连接到Jetson Nano GPIO引脚,参考组装说明和您之前关于线颜色的说明。
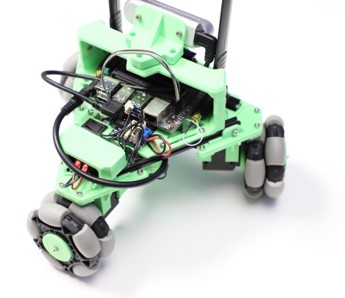
29.清理电缆并打开电源
-
将前面的Dynamixel电缆放在12V稳压器和MakerBeam前面。
-
根据需要连接其他Dynamixel和电源线。
-
安装电池并确保其卡入到位。 如果有电阻,请检查电缆和任何剩余的3D打印支撑材料,确保端子不弯曲。
-
将推动器(Kaya_Pusher)向下滑入推进器支架(Kaya_Pusher_Mount)进行安装。
-
恭喜你,你已经完全组装了一个Kaya机器人! 享受您的新创作和Isaac Robot Engine的乐趣!

关于耗电量大的应用的注意事项:
-
在Jetson Nano上运行要求更高的应用程序时可能会遇到问题,尤其是在“MAX-N”模式下运行时。
-
如果担心Jetson Nano过热,请注意3D打印的PLA塑料部件不会与散热器接触。 Kaya没有配备风扇来帮助冷却。 Jetson Nano开发套件提供4针连接器,可容纳5V PWM风扇。 但是,向Kaya添加风扇需要删除或自定义修改多个3D打印部件。
-
提高5V稳压器的标称输出电压有助于防止瞬态电压骤降的影响。 这可以通过在Pololu 5V稳压器板上的FB和GND引脚之间焊接通孔电阻来实现。 电阻值为82.5 kOhm时,额定输出电压增加到5.143V。

- 下图显示了正确安装的电阻器。

- 还可以在调节器输出端子上放置一个电容器(100-1000 uF),以进一步防止瞬态电压波动。
- 有关更多信息,请参考Microchip MIC2101的数据表。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号