



















Turbot3-slam入门教程-测试-网络设置
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

Turbot3-slam入门教程-测试-网络设置
说明:
- 介绍如何设置Turbot3的主从模式
- 介绍如何同步时间,如果时间不同步,容易出现TF变换错误
- turbot3为从机,PC为主机
时间同步
- turbot3和PC分别安装chrony,参考文章
$ sudo apt-get install chrony ntpdate- turbot3和PC分别安装ntpdate ,[参考文章][2],[参考文章][3]
$ sudo apt-get install ntpdate- turbot3和PC分别同步时间
$ sudo ntpdate ntp.ubuntu.com- 检测时间是否同步
$ date设置:
- 图示:
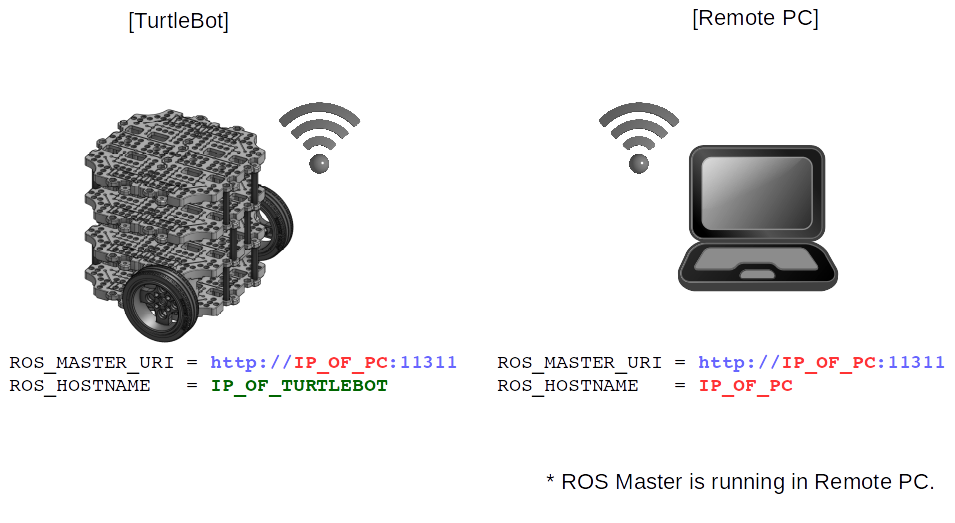
- ROS需要IP地址在PC和turbot3之间进行通信
- 分别在turbot3和PC,执行如下命令获得对应的IP地址:
ifconfig- 修改.bashrc
gedit ~/.bashrc- turbot3配置如下:
export ROS_MASTER_URI=http://IP_OF_PC:11311
export ROS_HOSTNAME=IP_OF_TURTLEBOT
export TURTLEBOT3_MODEL=waffle
export TURTLEBOT3_3D_SENSOR=kinect
export TURTLEBOT3_LASER_SENSOR=rplidar- PC配置如下:
export ROS_MASTER_URI=http://IP_OF_PC:11311
export ROS_HOSTNAME=IP_OF_PC
export TURTLEBOT3_MODEL=waffle-
ROS_MASTER 运行在远程PC上。
-
让环境生效:
source ~/.bashrc纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流