



















OpenCR入门教程-开发示例-OP3
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

说明
-
本教程介绍如何在OpenCR上传和编辑OP3固件
-
OpenCR用于人形机器人OP3中的电源和传感器控制
-
如果OP3的OpenCR固件已更改,请按照以下步骤进行更新
前提准备
- OpenCR通过Arduino IDE开发和下载固件,故需要Arduino IDE并安装OpenCR板软件包
警告:在将电源(电池或SMPS)连接到产品之前,请先关闭电源开关
下载OP3固件
-
请打开OP3的前盖,然后如下所示将USB连接到PC

-
连接USB后,在Arduino IDE中选择
Tools->Board->OpenCR -
在Arduino IDE示例中,选择OP3的固件
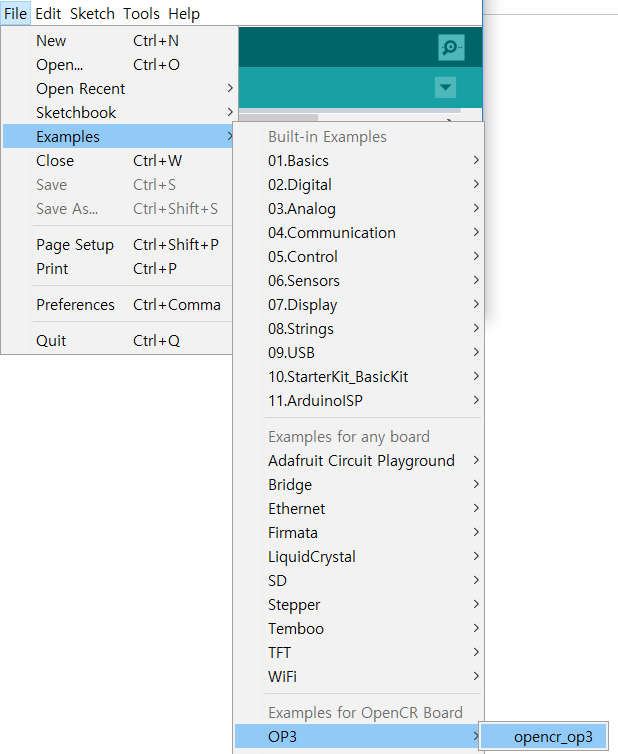
- 将
Tools->port更改为与开发板连接的端口
-
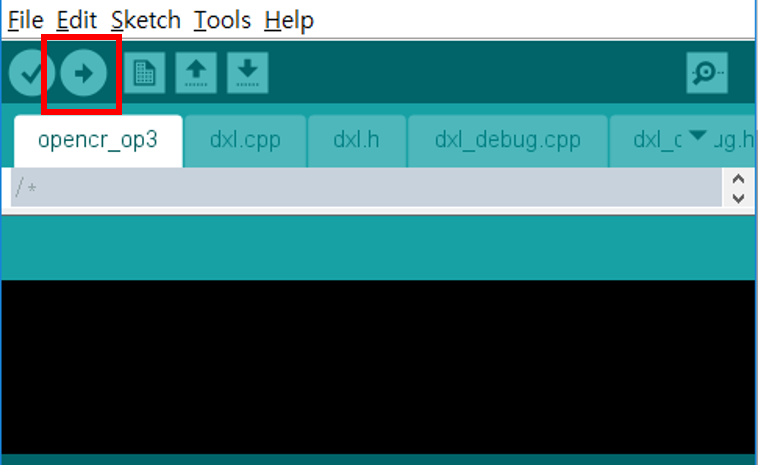
单击Arduino IDE中的图标,在下图中显示红色圆圈,以构建和下载固件
-
下载完成后,将自动执行固件
编辑OP3固件
-
OpenCR基本示例提供的固件是只读的
-
如果要编辑它,则必须将其保存到新文件夹并进行处理
-
打开OP3示例
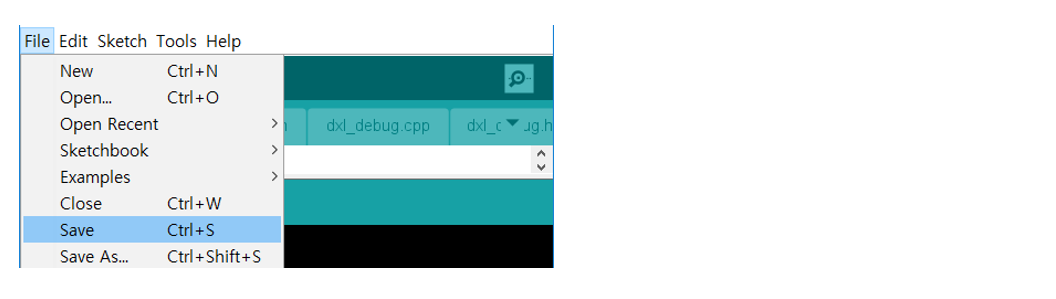
- 选择
File->Save
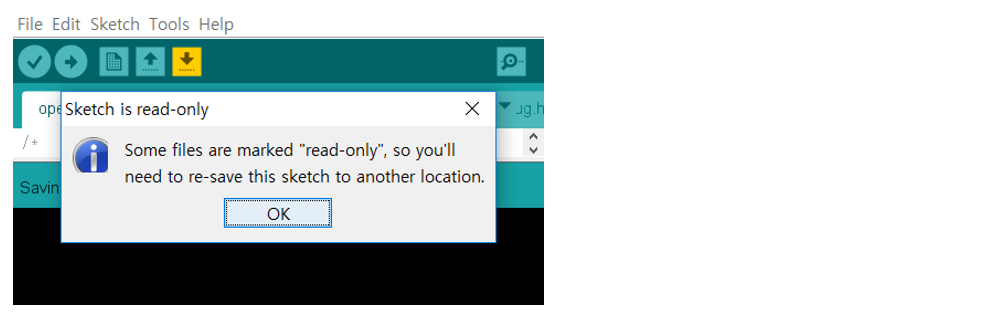
-
由于提供的示例为只读,因此选择确定将其另存为新文件
-
将其保存到新文件夹并进行编辑。编辑完成后,重复构建和下载固件的过程
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流