



















OpenCR入门教程-开发示例-Joystic传感器
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

说明
- 本教程介绍在OpenCR板上的Joystic传感器测试示例
传感器参数
-
规格
-
接口:Analog
代码
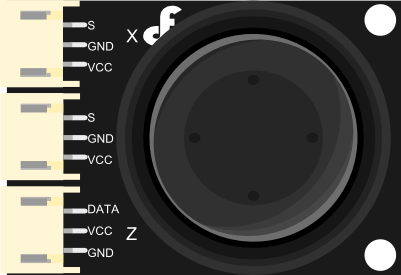
- Joystic是根据摇杆移动获得输出值
- x,y和z的信号连接到Arduino的A0,A1,A2
#define X A0
#define Y A1
#define Z A2
void setup()
{
Serial.begin(9600);
}
void loop()
{
int x,y,z;
x=analogRead(X);
y=analogRead(Y);
z=analogRead(Z);
.
Serial.print(" X = ");
Serial.print(x,DEC);
Serial.print(" Y = ");
Serial.print(y,DEC);
Serial.print(" Z = ");
Serial.println(z,DEC);
delay(100);
}演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=76473731&cid=130812559&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流