



















OpenCR入门教程-开发示例-倾斜传感器
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

说明
- 本教程介绍在OpenCR板上的环境光传感器测试示例
传感器参数
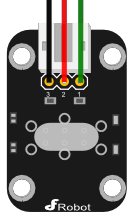
- 引脚
- 绿 : Signal
- 红 : Vcc
- 黑 : Gnd- 规格
- [规格说明书][2]
- 电源电压:3.3V至5V
- 接口:Digital代码
- 倾斜时红色指示灯亮,蓝色指示灯灭
- 不倾斜时红色指示灯灭,蓝色指示灯亮
- 倾斜传感器的Led_blue和Led_red信号引脚连接到D0,D1和D2
#define tilt 0
#define led_blue 1
#define led_red 2
void setup()
{
pinMode(tilt, INPUT);
pinMode(led_blue, OUTPUT);
pinMode(led_red, OUTPUT);
}
void loop()
{
if(digitalRead(tilt) == HIGH)
{
digitalWrite(led_blue, HIGH);
digitalWrite(led_red, LOW);
}
else
{
digitalWrite(led_blue, LOW);
digitalWrite(led_red, HIGH);
}
}演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=76473327&cid=130812317&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流