



















Xavier入门教程软件篇-安装iai_kinect2
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Xavier入门教程软件篇-安装iai_kinect2
说明:
- 介绍如何为Xavier安装iai_kinect2软件包
- 前提是已经整合好kinect2深度相机,Xavier入门教程硬件篇-外接深度相机kinect v2
步骤:
2)安装iai_kinect2
- 下载编译
$ mkdir -p ~/kinect2_ws/src
$ cd ~/kinect2_ws/src
$ git clone https://github.com/code-iai/iai_kinect2
$ rosdep install --from-paths . --ignore-src -r
$ catkin_make -DCMAKE_BUILD_TYPE="Release"3)测试iai_kinect2
- 启动kinect2_bridge.launch
roslaunch kinect2_bridge kinect2_bridge.launch- 效果图:
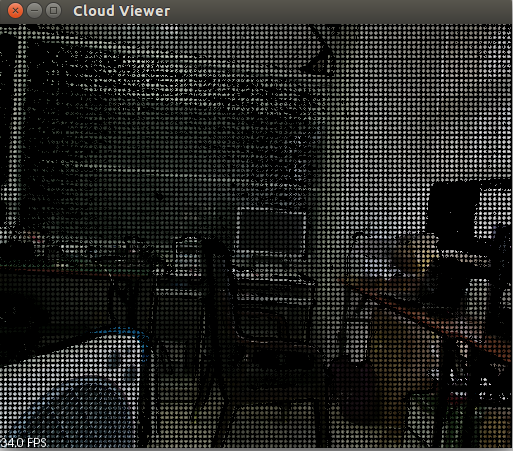
- 启动kinect2_viewer
rosrun kinect2_viewer kinect2_viewer kinect2 sd cloud- 效果图:
参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号