



















Turtlebot3-ARM入门教程-抓取挑战之多个目标抓取测试
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

说明
- 本教程介绍在完成前面的建图和相机标定后准备后如何进行测试
操作步骤
- [Remote PC] 启动machine tag,Moveit,Navigation和Camera
$ roslaunch turtlebot3_home_service_challenge_tools turtlebot3_home_service_challenge_demo_remote.launch
- [Remote PC] 运行manager包
$ roslaunch turtlebot3_home_service_challenge_manager manager.launch- [Remote PC] 任务命令
// Ready : TurtleBot3 will prepare to start a mission.
$ rostopic pub -1 /tb3_hsc/command std_msgs/String ready_mission
// Start : TurtleBot3 will start a mission.
$ rostopic pub -1 /tb3_hsc/command std_msgs/String start_mission
// Stop : TurtleBot3 will stop running a mission.
$ rostopic pub -1 /tb3_hsc/command std_msgs/String stop_mission
// Restart : TurtleBot3 will restart a mission by a given scenario.
$ rostopic pub -1 /tb3_hsc/command std_msgs/String restart_mission:SCENARIO_NAME- [Remote PC] 单独任务步骤测试
//导航
$ rostopic pub -1 /tb3_hsc/command std_msgs/String nav_start
$ rostopic pub -1 /tb3_hsc/command std_msgs/String nav_ar_marker_0
$ rostopic pub -1 /tb3_hsc/command std_msgs/String nav_ar_marker_1
$ rostopic pub -1 /tb3_hsc/command std_msgs/String nav_ar_marker_2
// 机械臂
$ rostopic pub -1 /tb3_hsc/command std_msgs/String arm_home
$ rostopic pub -1 /tb3_hsc/command std_msgs/String arm_joint
$ rostopic pub -1 /tb3_hsc/command std_msgs/String arm_task
$ rostopic pub -1 /tb3_hsc/command std_msgs/String open_gripper
$ rostopic pub -1 /tb3_hsc/command std_msgs/String close_gripper演示视频
- 该视频中的演示是基于一个自定义的场景来进行的
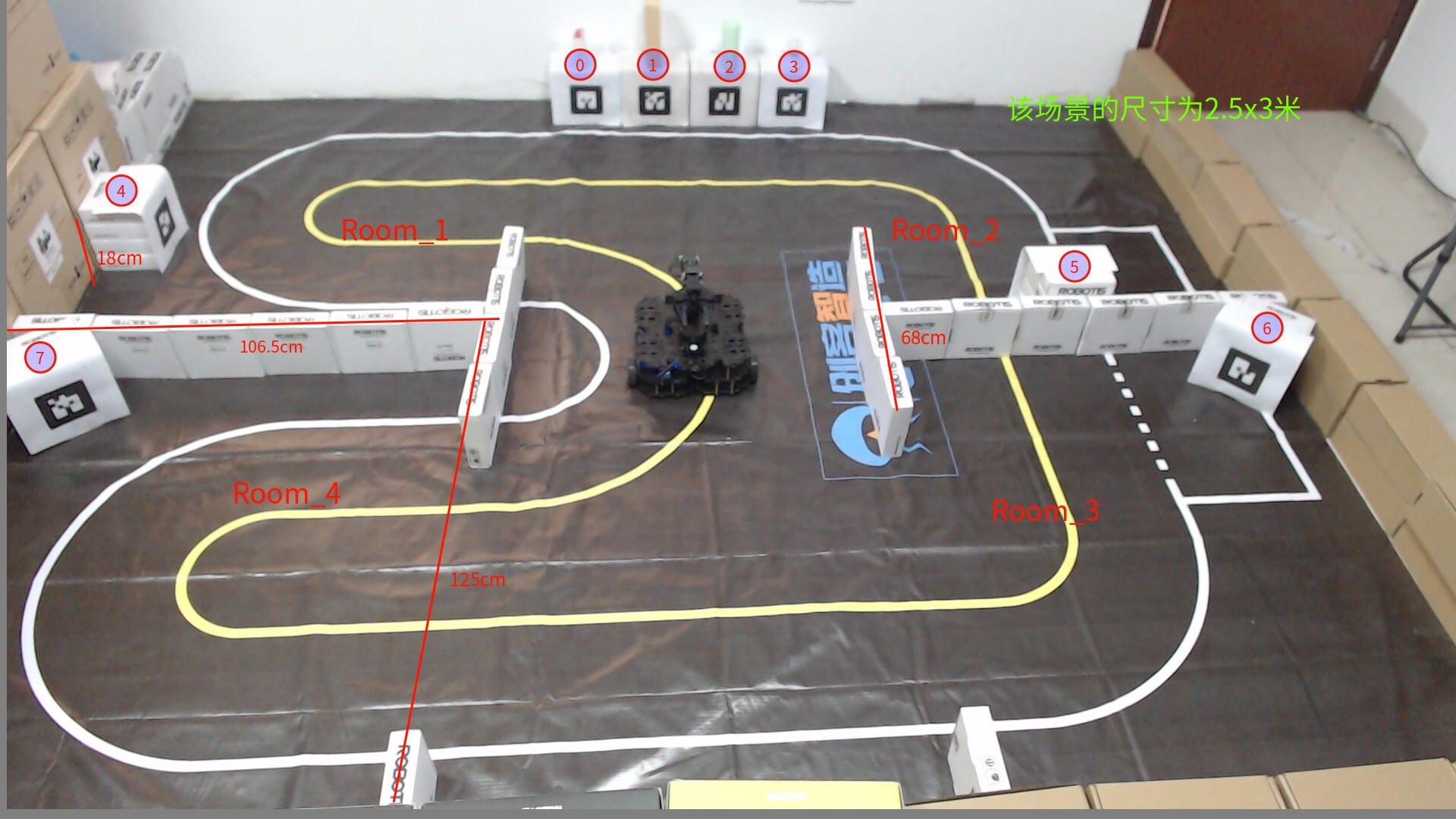
- 但若是基于自己搭建的测试环境,可以通过简单修改
scenario.yaml和room.yaml的配置文件来完成抓取挑战
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流