



















autodrive入门教程-测试-线速度校准
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
autodrive入门教程-测试-线速度校准
说明:
- 介绍如何进行线速度校准
步骤:
- 校准前先准备一个校准环境,比如在地砖上标定一米的距离
- 运行底盘
roslaunch racebot minimal.launch- 启动校准
roslaunch racebot_calib calibrate_linear.launch- 运行运行rqt_reconfigure
$ rosrun rqt_reconfigure rqt_reconfigure- 效果如下:
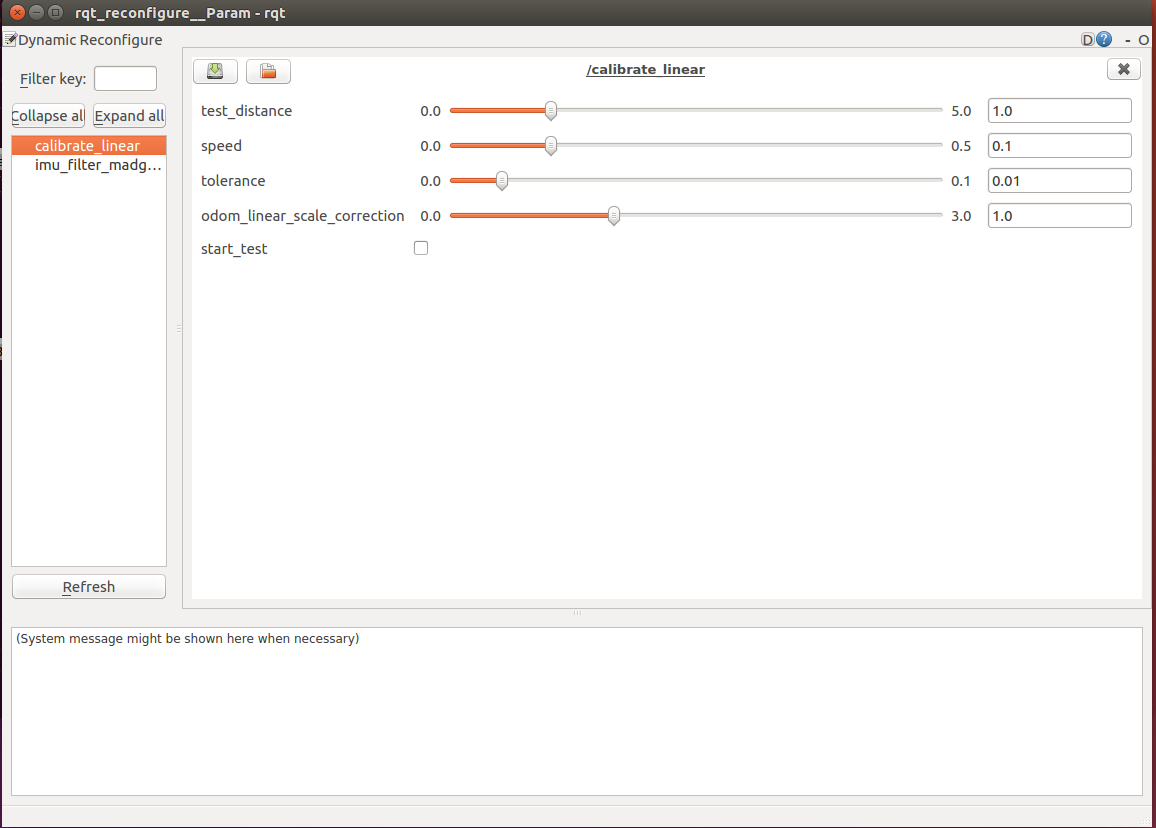
- 参数信息
test_distance: 测试小车所需移动的距离
speed:小车的移动速度,目前最低速度是0.45
tolerance:与目标距离的容差值
odom_linear_scale_correction: 线速度修正系数
start_test: 启动测试的复选框-
将小车放在起点位置,选择好相关的参数值后点击启动测试的复选框
-
小车移动完后,用直尺测量实际移动的距离
-
odom_linear_scale_correction= 移动的距离 / 测试距离
-
修改 vesc.ekf.yaml
roscd racecar/config/racecar-v2/
vim vesc.ekf.yaml- 修改里面的
- 新值speed_to_erpm_gain = odom_linear_scale_correction * speed_to_erpm_gain
- 写入新值,在通过微调测试,直到符合实际移动距离等于测试距离
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号