



















autodrive入门教程-MIT实验-Particle Filter定位
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
autodrive入门教程-MIT实验-Particle Filter定位
说明:
- 介绍如何实现Particle Filter定位
测试定位:
- [autodrive]修改localize.launch
rosed localization localize.launch-
同时配置"range_method"方法为rmgpu
-
使用A3激光雷达,配置“angle_step”参数为 72
-
使用A2激光雷达,配置“angle_step”参数为 18
-
[autodrive] 为map_server.launch指定地图
$ roscd localization/launch
$ vim map_server.launch- 内容如下:
<launch>
<arg name="map" default="/home/ubuntu/map/office-hector.yaml"/>
<node pkg="map_server" name="map_server" type="map_server" args="$(arg map)" />
</launch>- [autodrive] 启动底盘
$ roslaunch racebot minimal.launch- [autodrive] 启动激光雷达
$ roslaunch racebot_nav laser.launch- [autodrive] 启动定位程序
$ roslaunch localization localize.launch- [Remote PC] 启动rviz
roslaunch localization localize_rviz.launch-
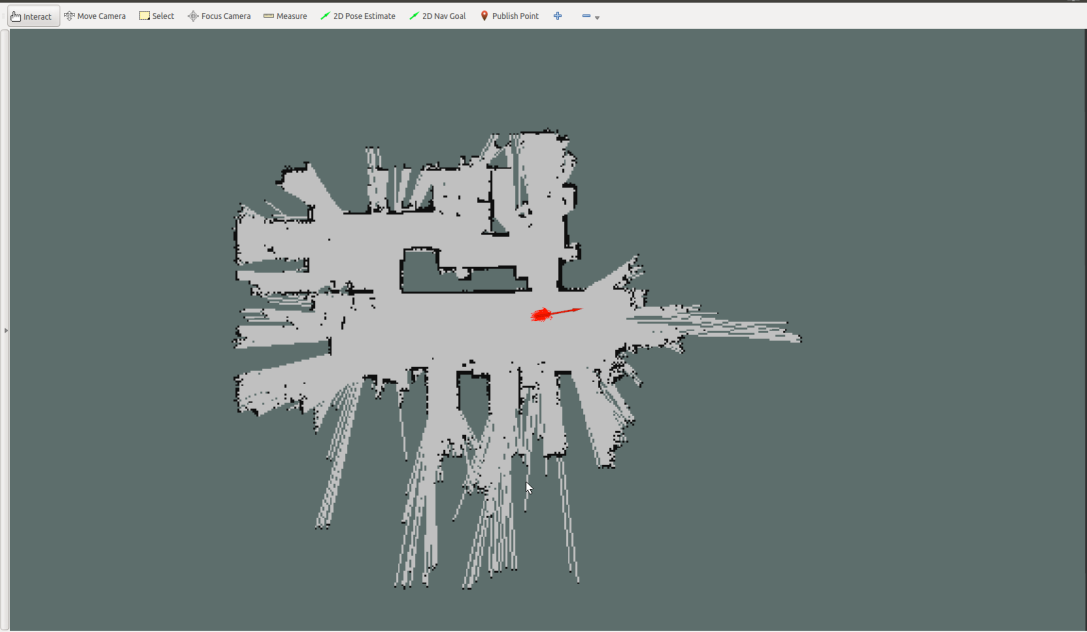
使用2D Pose Estimate来初始化位姿, 能比较准确定位到所在的位置
-
效果图:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号