



















autodrive入门教程-MIT实验-航点导航
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
autodrive入门教程-MIT实验-航点导航
说明:
- 介绍如何通过racebot实现指定轨迹运行
测试指定轨迹文件运行:
- [autodrive] 启动底盘
$ roslaunch racebot minimal.launch- [autodrive] 启动激光雷达
$ roslaunch racebot_nav laser.launch- [autodrive] 启动定位
$ roslaunch localization localize.launch- [autodrive] 启动跟随轨迹
$ roslaunch path_planning follow_trajectory.launch- [autodrive] 载入轨迹文件
$ roslaunch path_planning load_trajectory.launch-
小车会自动根据生成的轨迹文件运行
-
小车车速较快,注意保护以免碰撞,同时到达指定位置后,要终止所有脚本,才搬动小车,要不小车还是继续运行
-
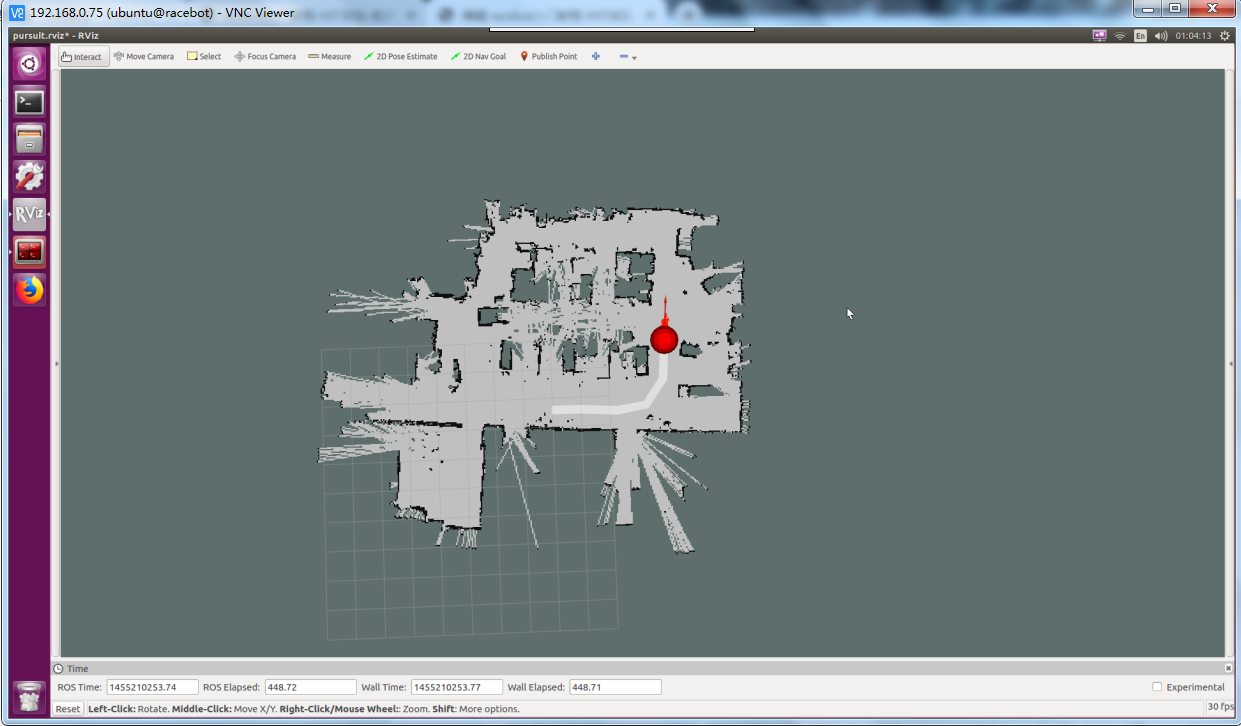
效果图:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号