



















Pupper机器狗入门教程-组装-主体组装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Pupper机器狗入门教程-组装-主体组装
说明:
- 介绍如何组装主体部分
##第1步##:
准备:
- 材料:M3锥形热固镶件,用于塑料x16,4个主体件
- 工具:烙铁设置为约500f / 260c
步骤:
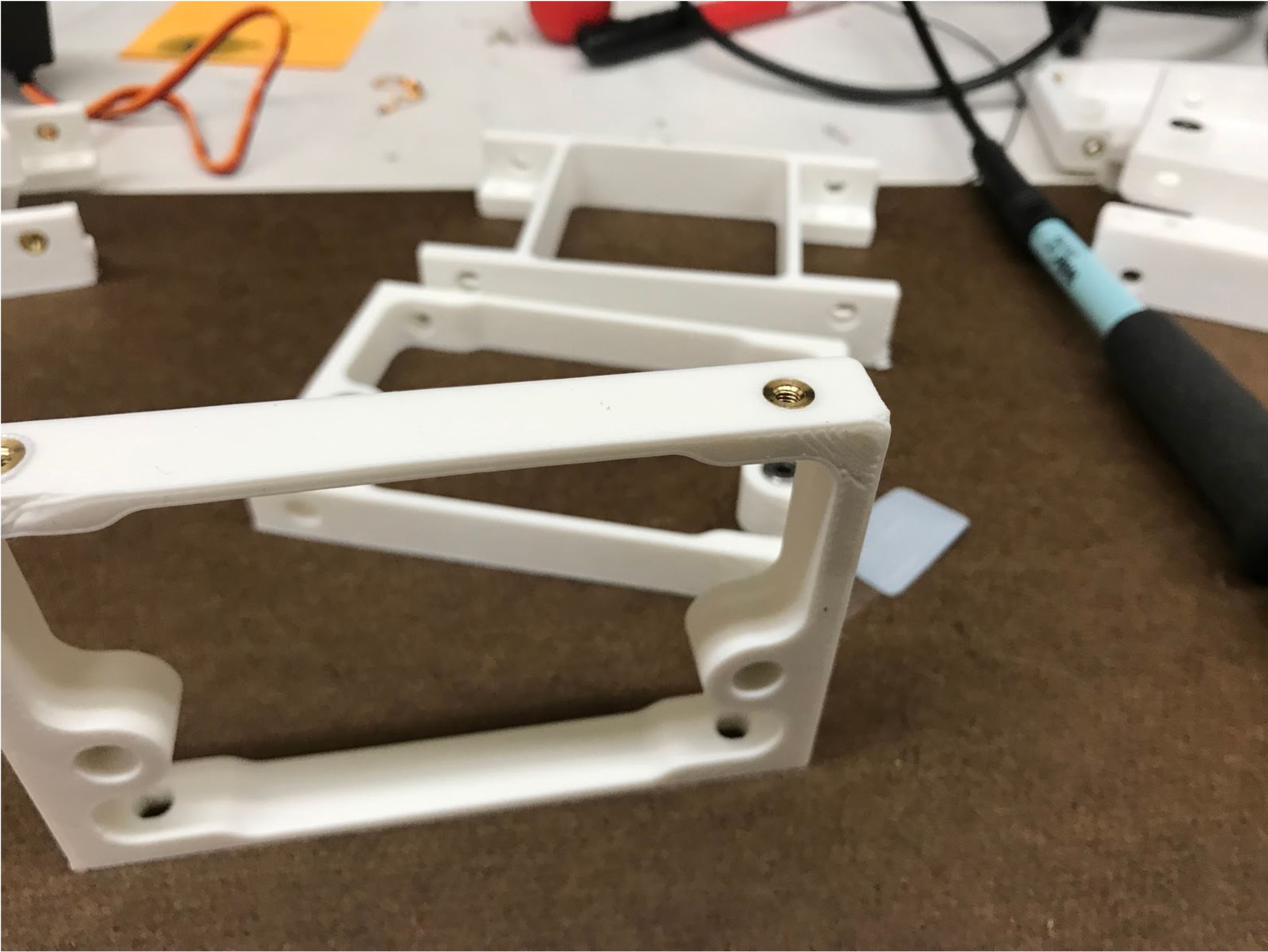
- 每个3D打印的主体都有四个孔-顶部两个,底部两个,用于容纳锥形的热固性塑料插入件
- 将插入件的锥形面朝下放入孔中
- 使用大约500f或260c左右的烙铁将插件轻轻地压入塑料中。
- 我建议仅使用熨斗的重量将插件压入,也建议分步进行,例如,将 - 其压入1mm,取出熨斗,然后再压入另外1mm等。
- 防止烙铁粘在烙铁上。
准备图:

完成图:
##第2步##:
准备:
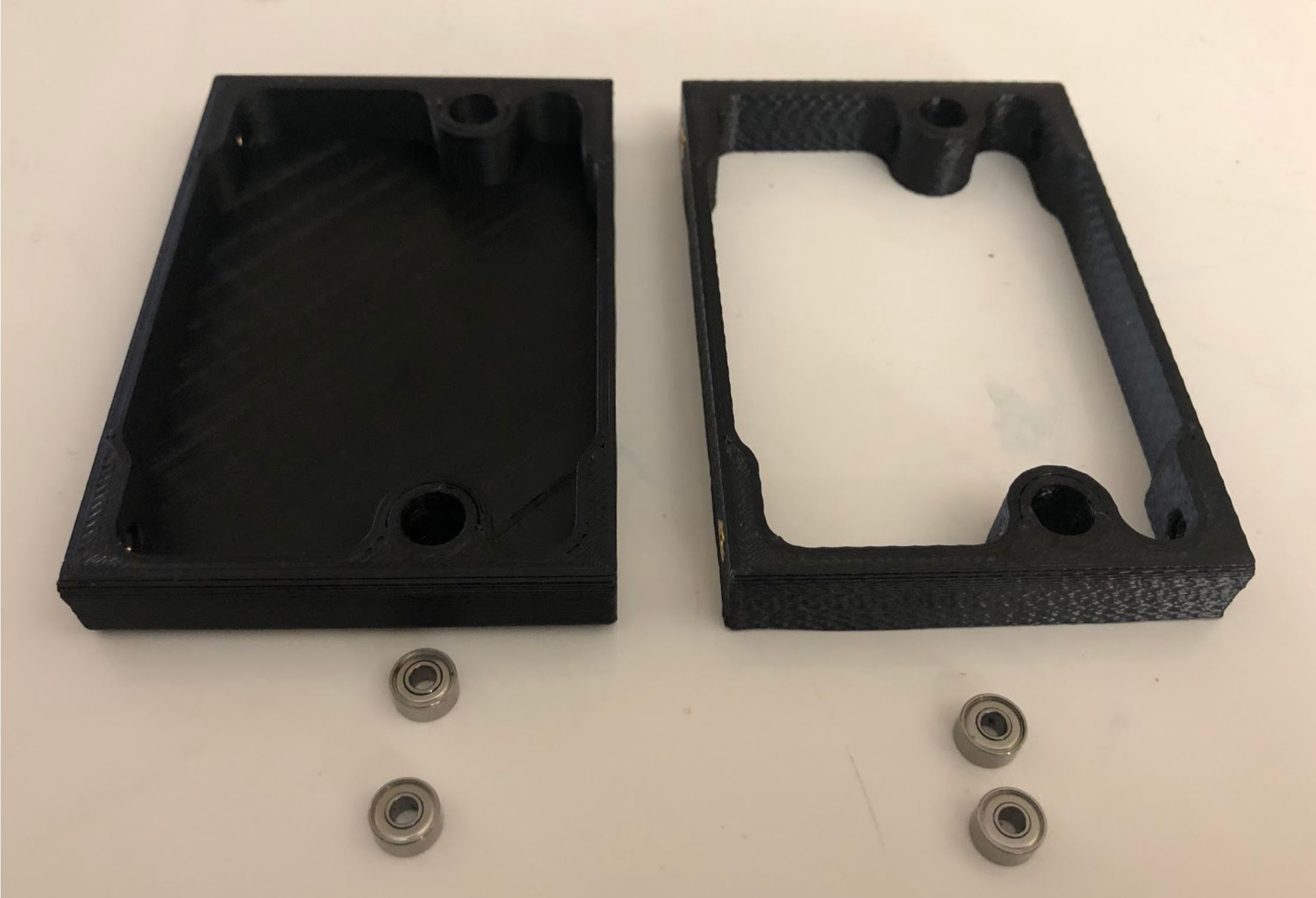
- 材料:4个轴承(3mm x 8mm x 4mm轴承MR693-zz),前前车身部件,后前车身部件
- 工具:您的手,手摇压力机或虎钳
步骤:
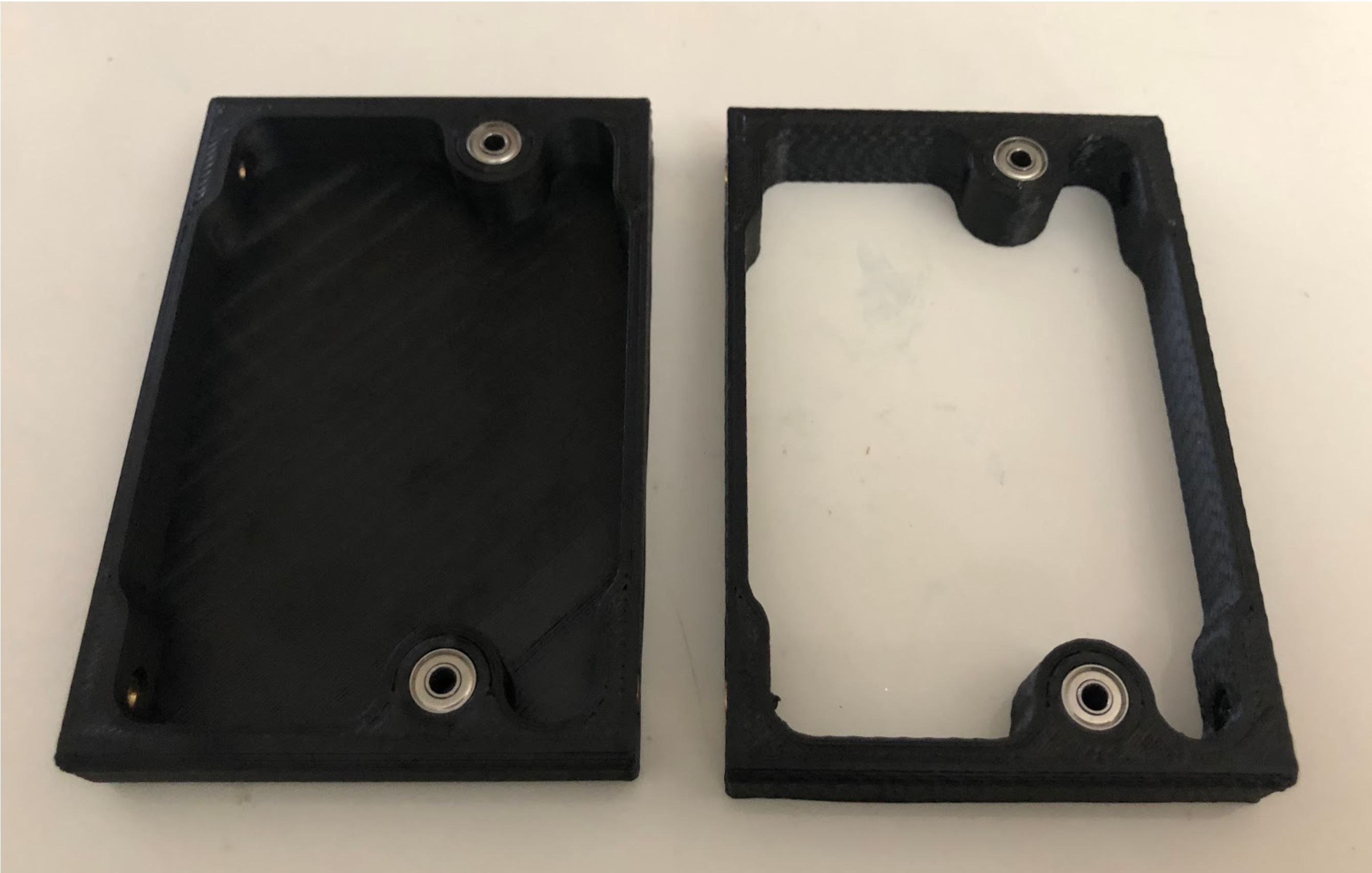
- 将两个轴承按入最前一块的两个孔中(称为“前前部”),然后将两个轴承按入后一块的两个孔中(称为“后前部”)。
准备图:
完成图:
##第3步##:
准备:
- 视频说明:https://youtu.be/Av9e2HzpbBo
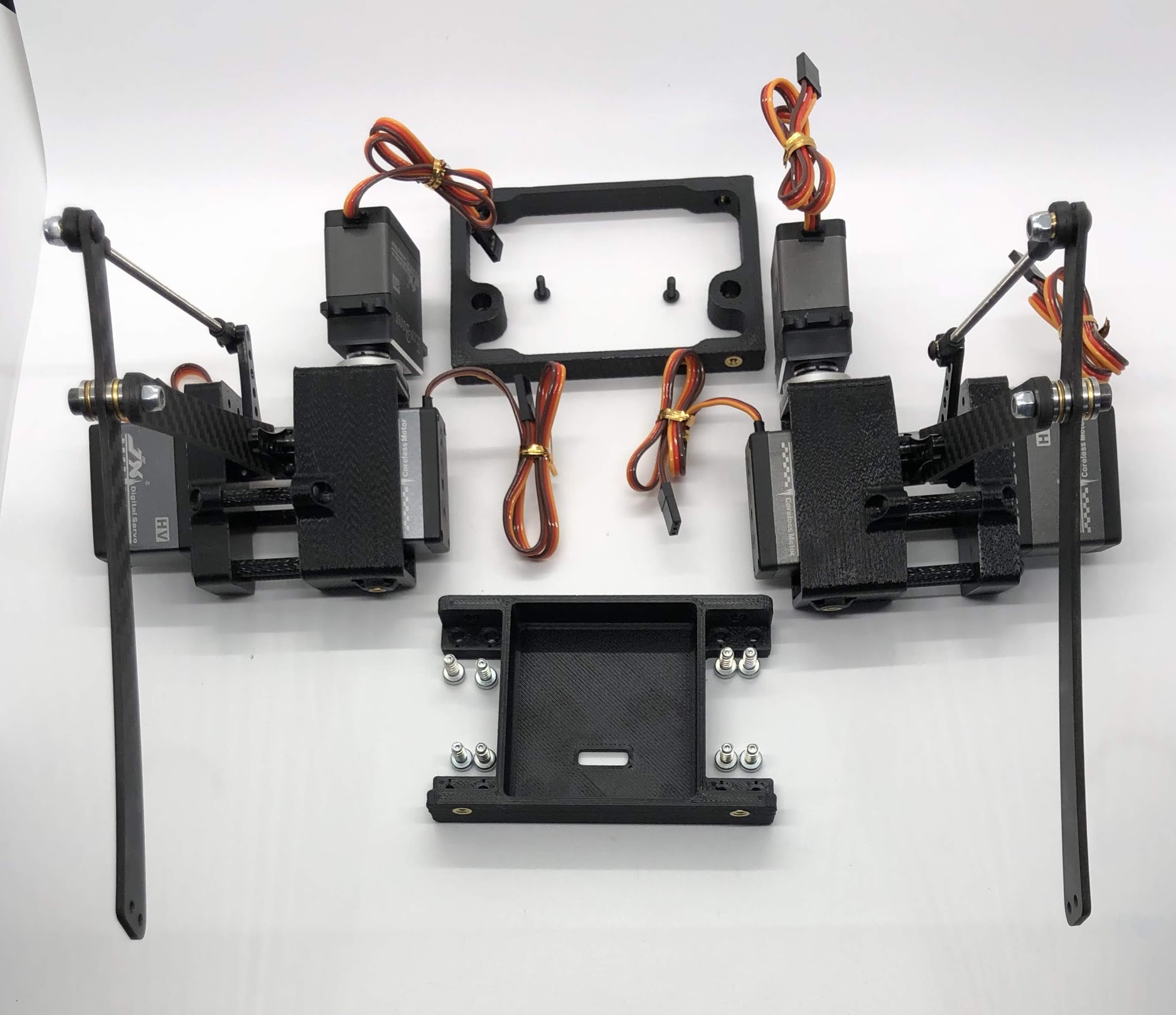
- 材料:16x M4x8螺钉(塑料),4x M3x8纽扣螺钉,四个髋部组件,四个主体部件
- 工具:Torx T20 + 2mm驱动器
步骤:
- 使用用于塑料的M4x8螺钉将两个髋关节组件固定到“后背”车身部件上,并将另外两个髋关节组件固定到“前背”车身部件上 然后,将M3x8钮扣头螺钉穿过所压入的轴承,分别压入前,前和后前部件,然后将它们旋入髋部组件的螺纹嵌件中
准备图:
完成图:

##第4步##:
准备:
- 视频说明:https://youtu.be/f4iDKkfCkIs
- 材料:16x M3x6圆头螺钉,2个支腿/主体组件,Bottton碳纤维板
- 工具:2mm六角螺丝刀
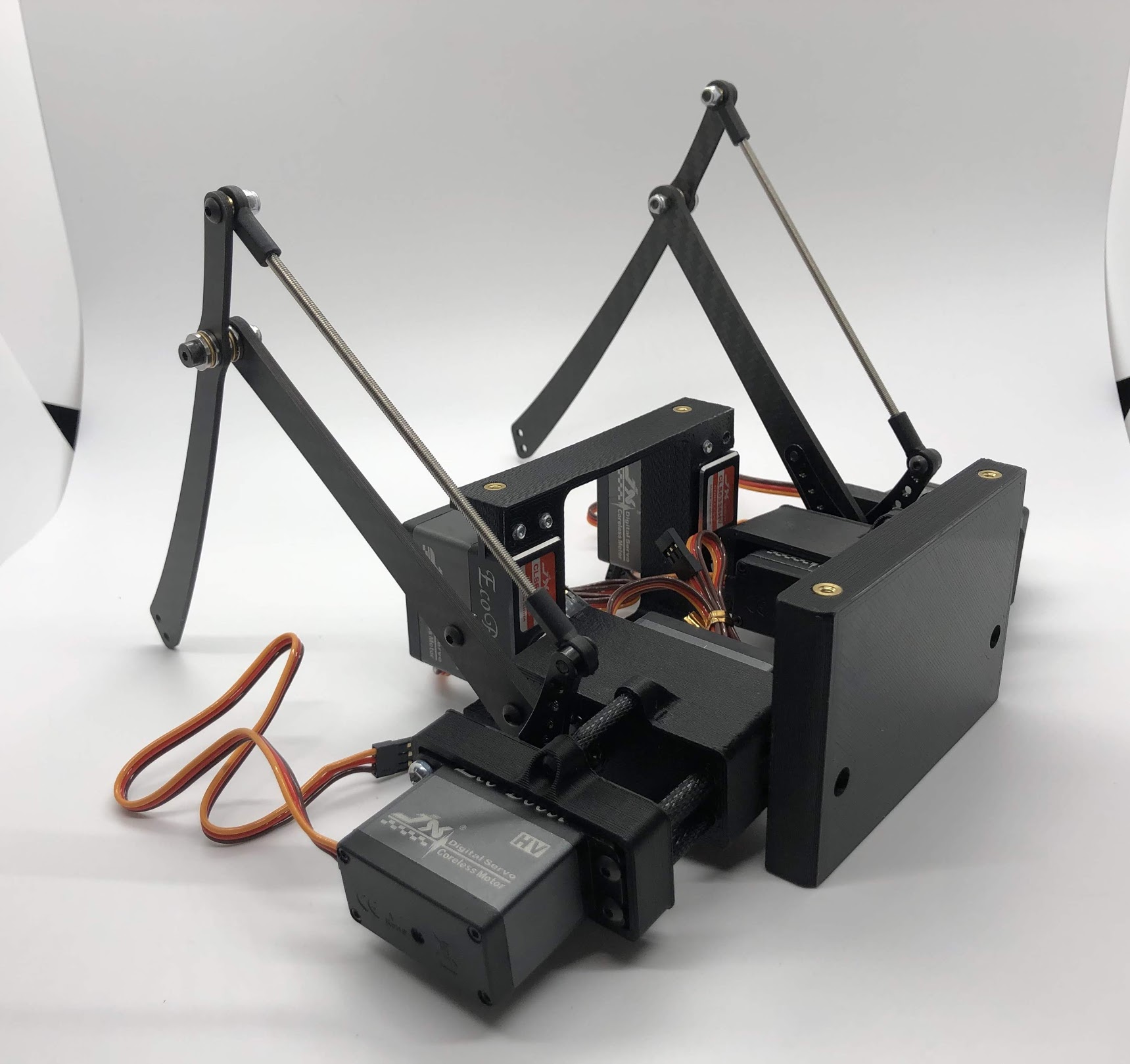
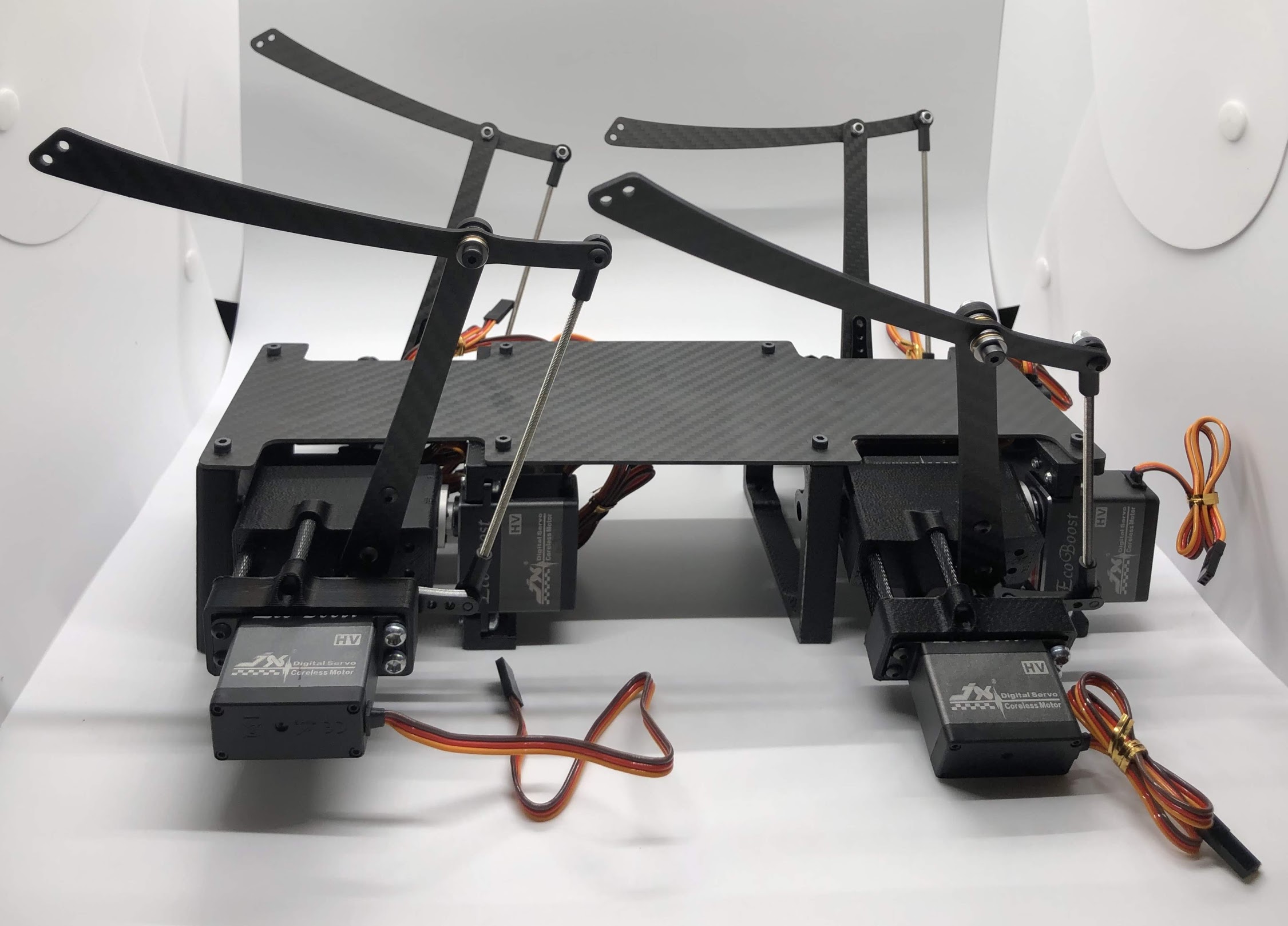
步骤:
- 使用M3x6圆头螺钉将您构建的两个支腿/车身组件固定到底部碳纤维板上。
准备图:

完成图:
##第5步##:
准备:
- 视频:https://youtu.be/ZlbkTc2Jxu8
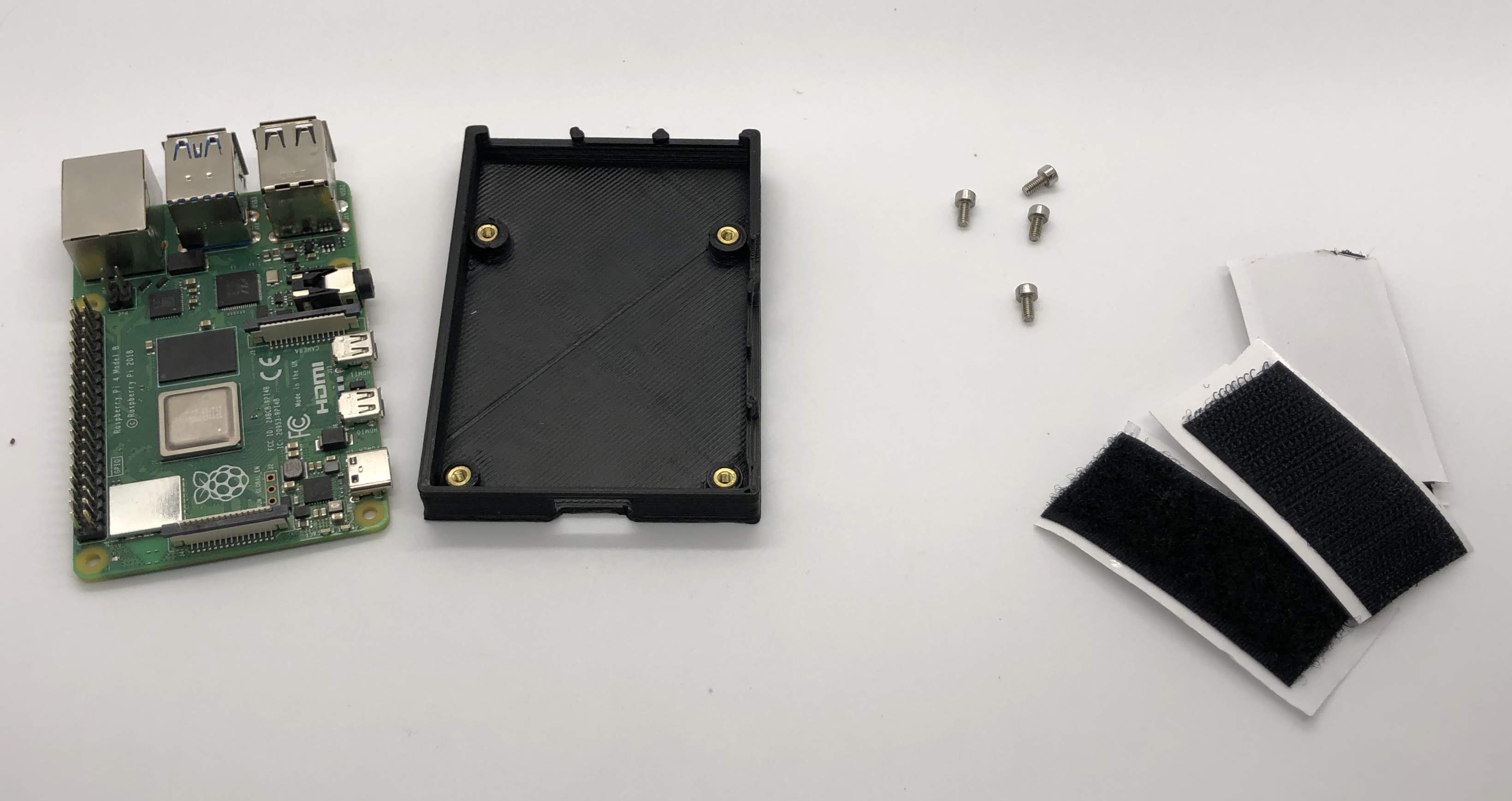
- 材质:Raspberry Pi外壳(picase.stl),4个M2.5锥形热固性插入件,4个M2.5x6内六角螺钉,双重锁定
- 工具:烙铁,2mm驱动器
步骤:
- 用与安装以前的插入件相同的方式,将M2.5插入件压入树莓派外壳的孔中。
- 然后,使用M2.5x6内六角螺钉将树莓派拧到外壳上
- 最后,将Dual-Lock添加到机箱中,以将其安装到底部碳纤维板上
准备图:
完成图:

##第6步##:
- 查看PCB组装步骤
##第7步##:
准备:
- 视频:https://youtu.be/ToJtlmDO4AY
- 材料:安装在底板上的四个髋部组件,安装有伺服功率分配帽的Raspberry Pi
- 工具:无
步骤:
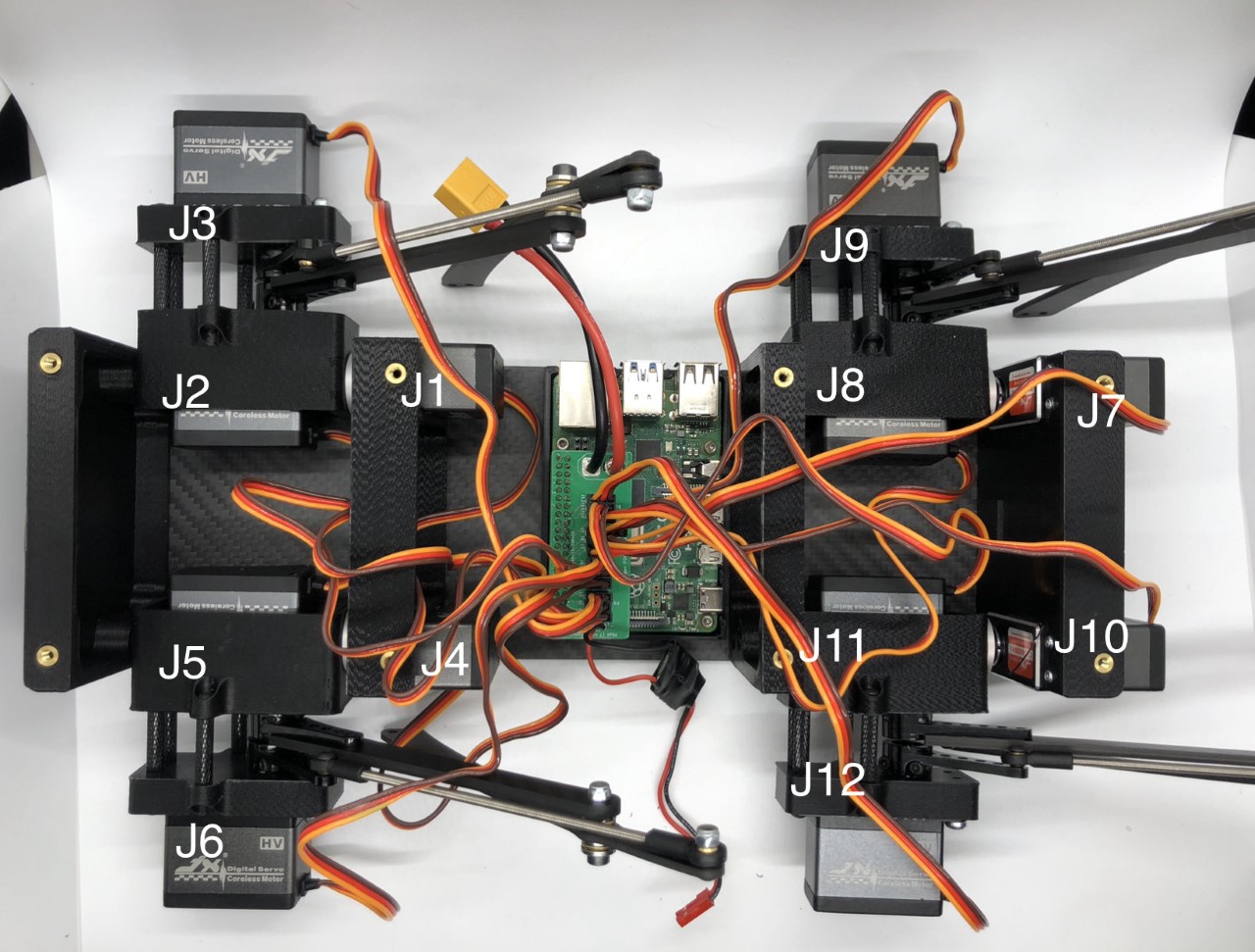
- 将PCB连接到Raspberry Pi
- 如下图所示,将伺服电缆插入定制电路板。
- J1至J12对应于焊接到电路板上的十二组插头之一。
- 电路板上有指示器,用于指示如何将来自伺服电动机的信号线,地线和正极线对准电路板,但是如果看不清它们,您可以知道伺服连接器上的信号引脚始终朝向 Raspberry Pi标头。
准备图:

完成图:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号