



















ROS2与Gazebo11入门教程-可见层
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何将层的元数据添加到视觉效果中,以便可以通过图形界面控制可见的层
在SDF上指派层
- 当前,层是由数字标识的。在模型SDF文件的每个
标签下,您都可以为元数据添加一个meta标签,然后再添加一个具有层号的 标签,如下所示:
<visual name='visual_0'>
<meta>
<layer>0</layer>
</meta>
...
</visual>- 没有指派层的视觉效果将无法切换其可见性,而且始终是可见的。
可视化层
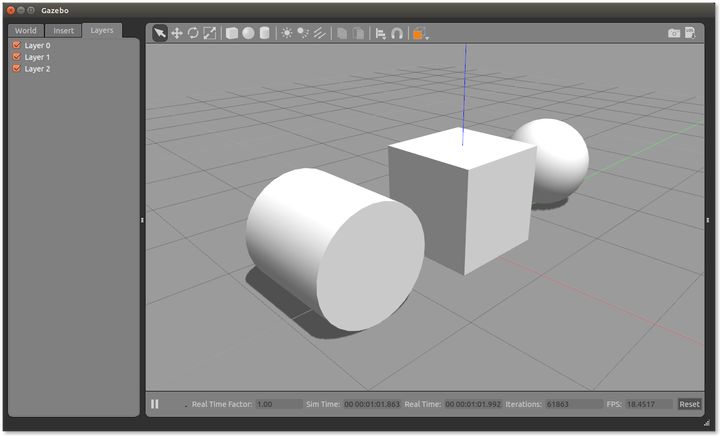
- 与Gazebo一起分发了一个示例仿真世界。可以使用以下命令加载这个仿真世界:
gazebo worlds/shapes_layers.world- 可以通过左侧面板上的“层(Layers)”选项卡切换每个层的可见性,如下图所示:
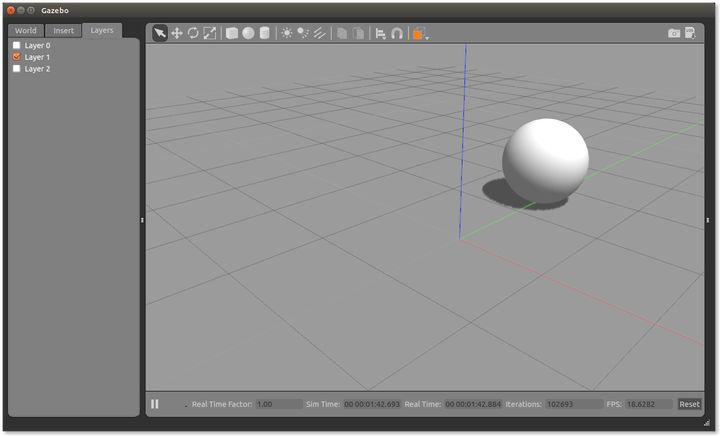
- 如果仿真中的所有视觉效果都没有层,则“层(Layers)”选项卡将会是空的。
参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号