



















ROS2与Gazebo11入门教程-修改仿真世界
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何修改仿真世界中包括场景和物理属性在内的全局属性
修改仿真世界
- 首先运行以下命令来启动Gazebo软件:
$ gazebo场景属性(Scene Properties)
- 在Gazebo左面板上方的“世界(World)”选项卡中,选中“场景(Scene)”项。场景属性的一个列表将会显示在下方的列表框中。单击列表框中各个条目左侧的三角形可以展开其属性(见下图)。
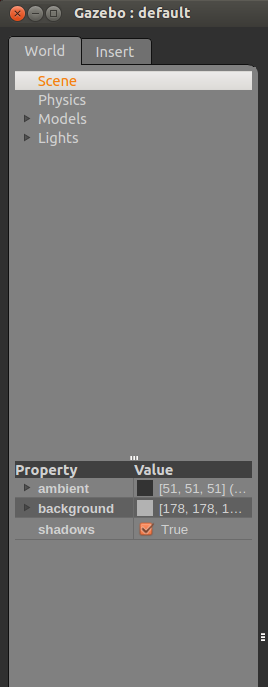
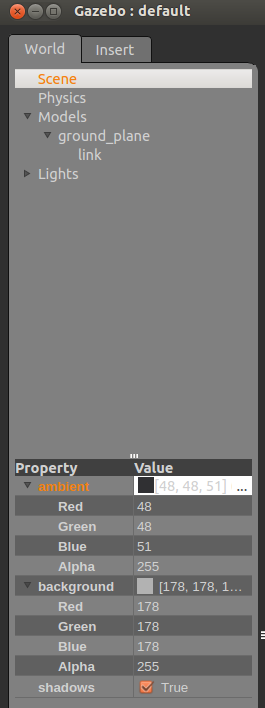
- 这些属性使您可以更改环境光。请注意:如果启用了“天空(Sky)”仿真世界,则背景颜色不会更改
物理属性(Physics Properties)
-
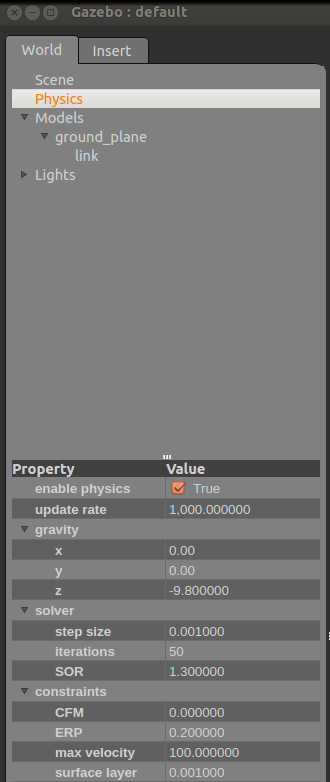
在“世界(World)”选项卡中,选中“物理(Physics)”项。物理属性的一个列表将会显示在下方的列表框中
-
“启用物理(enable physics)”复选框可以用于禁用物理,而同时允许插件和传感器继续运行。
-
“实时更新速率(real time update rate)”参数以Hz为单位指定每秒将尝试进行的物理更新次数。如果将此数字设置为零,则会以尽可能最快的速度更新。请注意,“实时更新速率”和“最大步长(max step size)”的乘积代表目标“实时因子(real time factor)”或仿真时间与实际时间的比率。
-
“最大步长”用于指定每个物理更新步骤的持续时间(以秒为单位)。
在重力(gravity)区块中:
-
x、y和z参数用于设置全局重力矢量的三个分量,单位为m/s2。
-
在解算器(solver)区块中:
-
iterations参数用于指定迭代LCP解算器或求解器(由ODE和Bullet使用)的迭代次数。
-
SOR参数代表“连续超松弛(successive over-relaxation)”,可用于尝试加快迭代方法的收敛速度。
-
约束区块包含以下几个与求解约束有关的参数:
-
CFM和ERP参数代表“约束力混合(Constraint Force Mixing)”和“错误减少参数(Error Reduction Parameter)”,这两个参数由物理引擎ODE和Bullet使用。CFM和ERP参数可能与线性刚度和阻尼系数相关。
-
“最大速度(max velocity)”和“表面层(surface layer)” 参数用于解决通过分裂脉冲方式的接触问题。渗入深度超过“表面层”参数指定的深度且法向速度小于“最大速度”参数值的任何接触都将不会反弹回来。
参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号