



















ROS2与Gazebo11入门教程-收集保存HDF5数据集
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何收集保存HDF5数据集
简介
-
Gazebo提供了专用工具来将物理仿真数据转储为HDF5格式。
-
该数据集与“多体动力学基准问题(BPMD)”框架相结合可以用于对解决无偏双侧关节和单侧摩擦接触的多体系统的不同方法进行对比。
-
这些数据集将有助于研究人员专注于现有方法的分析和更精确求解器的构造,而不必担心整个物理引擎的实现问题
示例用法
-
安装hdf5
-
运行以下命令来安装hdf5开发包:
sudo apt-get install libhdf5-dev编译构建Gazebo
- 这个HDF5专用工具要求将cmake参数HDF5_INSTRUMENT设置为True(默认为False)来从源代码构建Gazebo。
- 参阅这个教程来了解有关如何从源代码构建Gazebo的更多信息。
- 具体命令为:
cd ~/gazebo
mkdir build
cd build
cmake -DHDF5_INSTRUMENT=True ../
make -j4
sudo make install收集数据集
- 仅使用gzserver收集数据集
./test/integration/INTEGRATION_physics_inertia_ratio- 使用仿真世界文件收集数据集
gazebo ~/gazebo/worlds/friction_demo.world- 这样,就会在运行上面这条命令的目录中生成一个名为ode_frames.hdf5的文件。
浏览HDF5文件
- 软件hdfview可用于打开hdf5文件。可以通过终端来安装该软件,命令为:
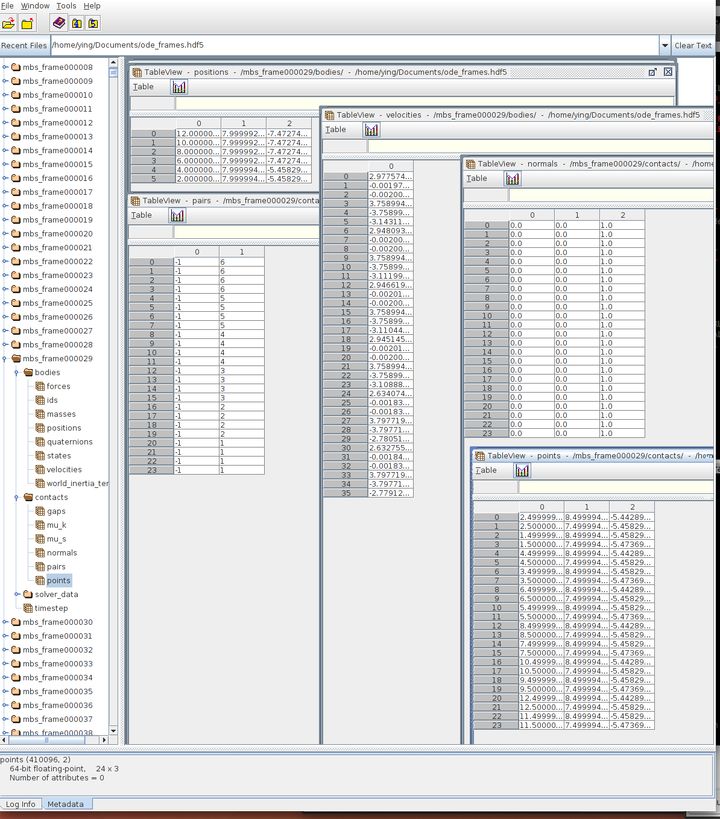
sudo apt-get install hdfview- 安装好hdfview软件后,用它打开保存的hdf5文件,命令为:
hdfview ode_frames.hdf5- 这样就会显现出一个分层结构文件,如下图所示:
- 该专用工具会为每个时间步保存分层结构数据,因此将数据写入到ode_frames.hdf5文件会很慢。
- 请耐心等待,尤其是对于诸如Atlas机器人或多体仿真等复杂的仿真场景更是如此)
参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号