



















Turbot3-ARM入门教程-抓取挑战之前提准备
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

说明
-
本教程介绍进行抓取挑战前需要进行的前提准备
-
本系列抓取挑战教程是基于官方的home_service_challenge来编写的
-
由于Turbot3-ARM使用的硬件与官方的Turtlebot3-ARM有所不同,故源码上进行了一定的修改,且不使用远程脚本使用的方式
实际场景布置
- 下图为官方的测试场景

-
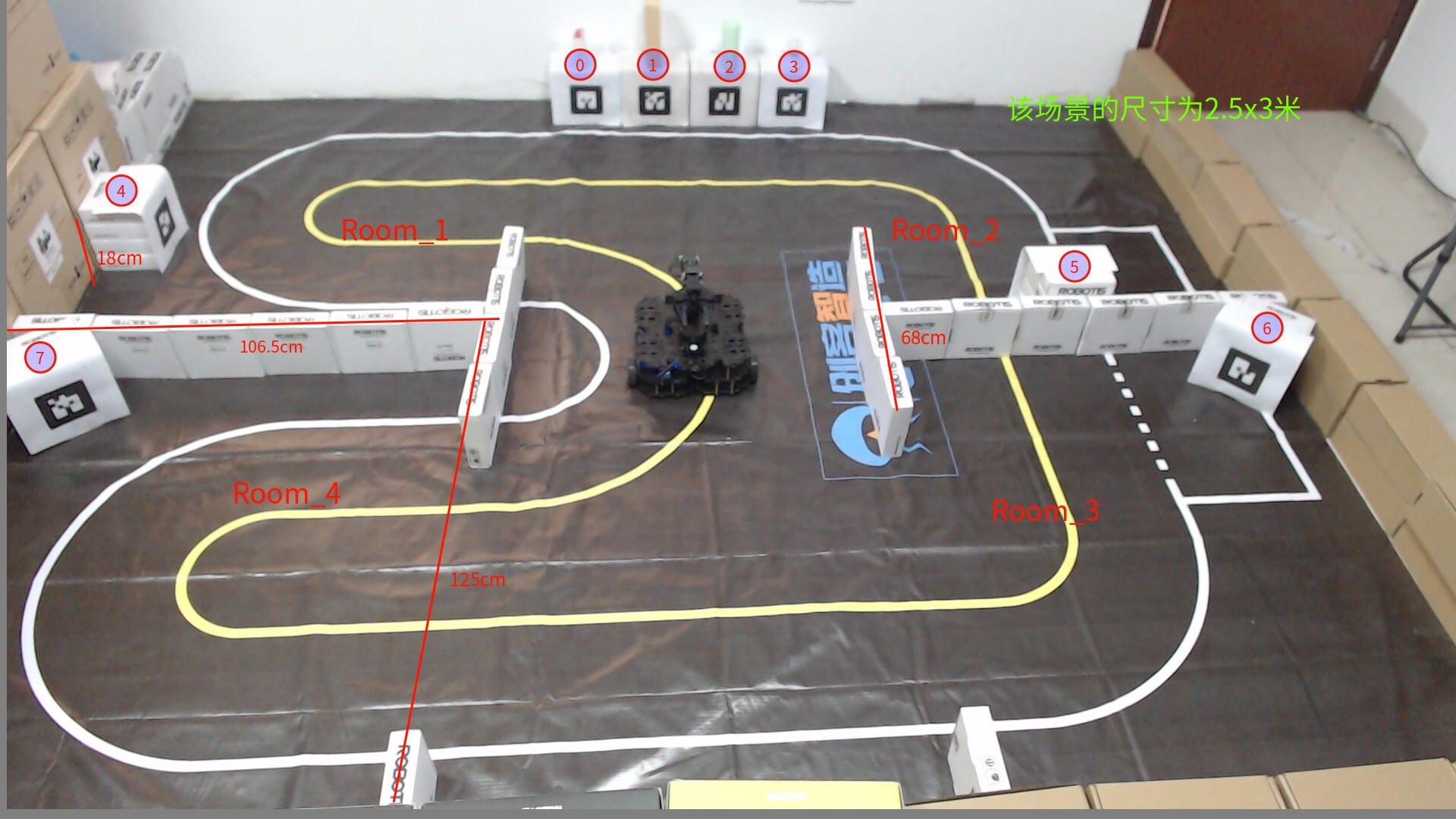
一般情况下,个人测试时,可以搭建一个简易的场景
-
类似于下图的2.5米x3米的场景
- 准备抓取挑战用到的4个ar标签
// 自动生成8.8cm大小的ar标签
$ rosrun ar_track_alvar createMarker -s 8.8 0
$ rosrun ar_track_alvar createMarker -s 8.8 1
$ rosrun ar_track_alvar createMarker -s 8.8 2
$ rosrun ar_track_alvar createMarker -s 8.8 3
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流