



















FarmbotX入门教程-测试-XYZ轴移动和校准
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
文章说明
- 介绍如何测试移动XYZ轴以确保电机正常工作
- 介绍如何校准XYZ轴以确保能准确移动相应的位置
欢迎加入我们的Farmbot/FarmbotX交流群,微信扫描右侧二维码立即进群交流
相关设备
-
FarmbotX套件: 采购地址

- 打开控制界面
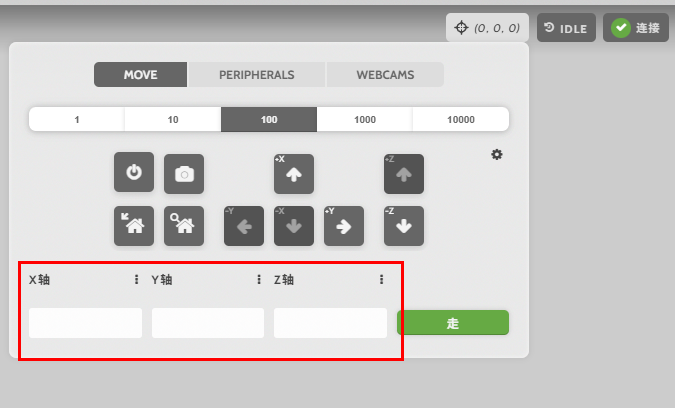
- 这个是简易控制测试的界面

- 在连接状态良好的情况下,可以通过点击图标+X向前, +Y向右,-Z向下移动来确认XYZ轴是否正常移动。
- 或者在X轴,Y轴,Z轴的输入框里面数字对应数字,比如X=100,Y=100,Z=-100,来确认XYZ是否正确移动。
- 如果我们在参数配置哪里没有正确配置,移动距离和设置的距离可能是不匹配的,只有通过校准来解决。
测试校准步骤
- 打开控制界面
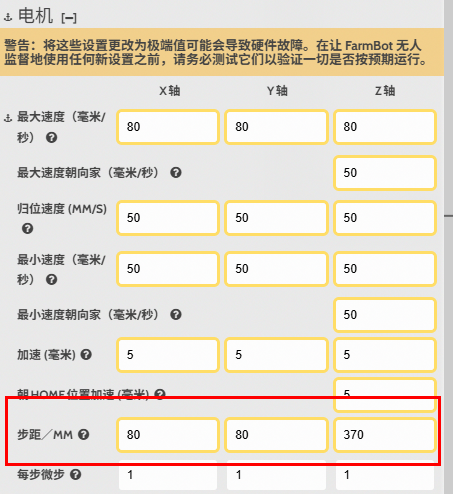
- 通过手工设置行走的行程来进行测试,然后通过设置步距来修正
-
- 校准X轴
- 在X轴输入框输入100(MM),代表是走10CM,如果走不到10CM或超过10CM说明精度不够。
- 假设设置步距60,设置X轴走10CM,实际走了15CM,表示电机走得比预期多了 1.5 倍,也就是说步距设置得太大了
- 实际通过如下公式修正步距
用以下公式来修正步距(step per mm):
新步距 = 原步距 × (理论移动 / 实际移动)
即:
新步距 = 60 × (10 / 15) = 60 × 0.6667 ≈ 40-
设置新步距为60,再输入100测试,看是否正确走10CM。如果符合则说明设置的步距正确。
-
- 校准Y轴
-
在Y轴输入框输入100(MM),代表是走10CM,如果走不到10CM或超过10CM说明精度不够。
-
假设设置步距60,设置Y轴走10CM,实际走了15CM,表示电机走得比预期多了 1.5 倍,也就是说步距设置得太大了
-
实际通过如下公式修正步距
用以下公式来修正步距(step per mm):
新步距 = 原步距 × (理论移动 / 实际移动)
即:
新步距 = 60 × (10 / 15) = 60 × 0.6667 ≈ 40-
设置新步距为60,再输入100测试,看是否正确走10CM。如果符合则说明设置的步距正确。
-
- 校准Z轴
-
在Z轴输入框输入-100(MM),代表是走10CM,如果走不到10CM或超过10CM说明精度不够。
-
假设设置步距60,设置Z轴走10CM,实际走了15CM,表示电机走得比预期多了 1.5 倍,也就是说步距设置得太大了
-
实际通过如下公式修正步距
用以下公式来修正步距(step per mm):
新步距 = 原步距 × (理论移动 / 实际移动)
即:
新步距 = 60 × (10 / 15) = 60 × 0.6667 ≈ 40-
设置新步距为60,再输入-100测试,看是否正确走10CM。如果符合则说明设置的步距正确。
-
通过上述的校准并修正步距后,基本能正确的到达需要的距离。
查找原点
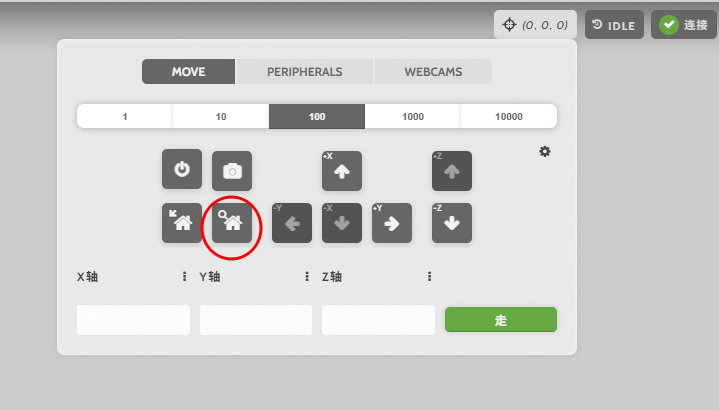
- 通过点击查找原点图标
-
FarmbotX自动在XYZ轴查找原点
-
先在Z轴行走到Z轴的限位开关处,通过2次碰撞限位开关来确认达到Z原点
-
再在Y轴行走到Y轴的限位开关处,通过2次碰撞限位开关来确认达到Y原点
-
最后在X轴行走到X轴的限位开关处,通过2次碰撞限位开关来确认达到X原点
-
每次启动之后,如果XYZ任意轴的位置不在原点,就可以通过查找原点来恢复起始位置。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号