



















Arduino库教程-Stepper-Stepper One Revolution
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Stepper One Revolution
-
步进电机,由于其独特的设计,可以没有任何反馈机制而控制到一个高度的准确性。一个步进电机的轴,安装有一系列的磁铁,是由一系列的电磁线圈控制,这些线圈按一个特定的序列排列正负极,尤其是向前或向后移动一小“步”。
-
有两种类型的步进电机,单极型和双极型晶体管,而且知道你正在使用哪种类型是非常重要的。每种电机,都有一个不同的电路。示例代码将控制两种电机。看看单极性和双极性电机的原理图,和关于如何连接你的电机的信息。
-
在这个例子中,轴是一个完整的旋转顺时针旋转,通过Arduino Stepper 库来控制步进电机的步进数目。无论是单极或双极电机,均由数字引脚8,9,10,和11控制步进。
-
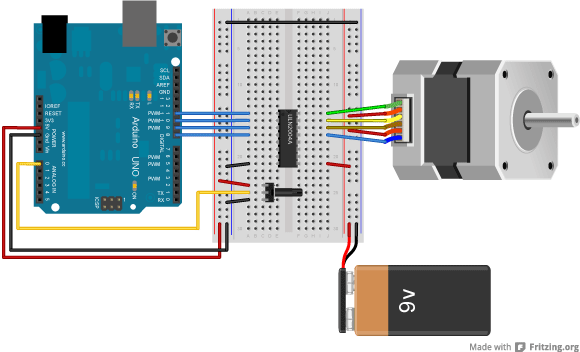
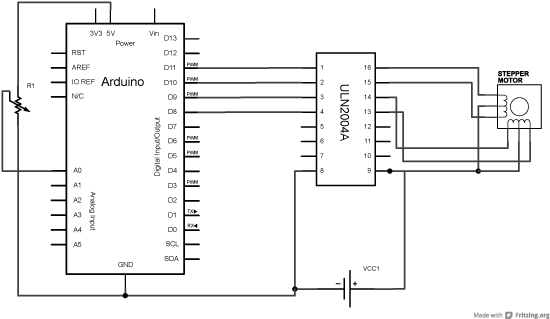
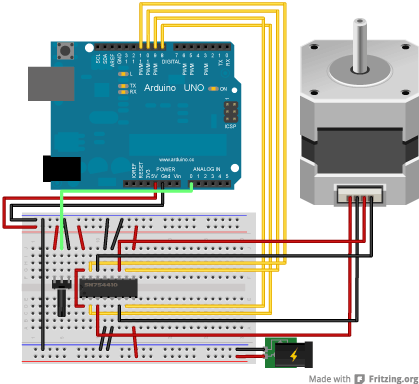
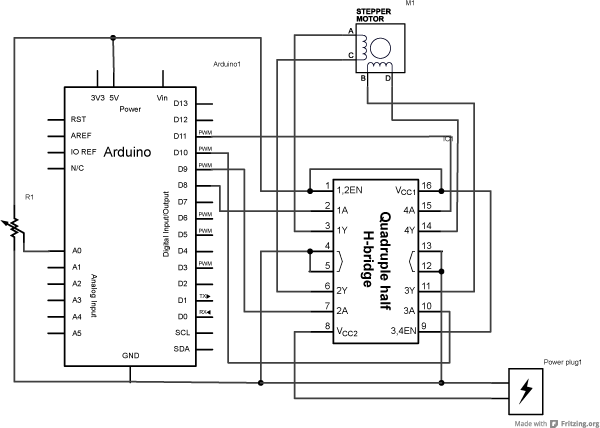
如果你正在使用一个单极型步进电机,Arduino或genuino开发板将会连接到一个U2004达林顿管阵列。或者连接到SN754410NE H-桥,如果你有一个双极电机。
-
更多关于这两种类型的差异的信息,请看Tom Igoe's page on stepper motors。
硬件要求
- Arduino or Genuino Board
- 10k ohm 电位器
- 步进电机
- U2004 达林顿管阵列 (如果用单极型电机)
- SN754410ne H-桥 (如果用双极型电机)
- 合适的为你的步进电机供电的电源
- 连接线
- 面包板
电路
-
下面你会发现电路为单极性和双极性步进电机。在任何一种情况下,最好是你的步进电机从外部供电,因为直接从你的Arduino电路板供电,他们会汲取太多能量。
-
在这两种电路里,连接一个10K的电位器到电源和接地,而它的wipper输出到模拟引脚A0。
-
注意:下面的两个电路都是四线配置。两条线配置将不会与提供的代码一起工作。
-
单极型步进电路和原理图
-
双极型步进电路和原理图
样例代码 对单极型和双极型步进机
/*
Stepper Motor Control - one revolution
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 - 11 of the Arduino.
The motor should revolve one revolution in one direction, then
one revolution in the other direction.
Created 11 Mar. 2007
Modified 30 Nov. 2009
by Tom Igoe
*/
#include <Stepper.h>
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
}[Get Code] 更多
- Stepper myStepper = Stepper(steps, pin1, pin2, pin3, pin4)
- stepper.setSpeed()
- stepper.step()
- Stepper library reference
- Motor Knob: 使用一个电位器控制一个高度精确的步进电机。
- StepperOneRevolution - 顺时针旋转一圈,逆时针旋转一圈。
- StepperOneStepAtATime - 一步一步转动轴来检查电机是否正确接线。
- StepperSpeedControl - 用电位器控制步进速度。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号