



















ros2与turtlebot3仿真教程-turtlebot3自走避障
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

文章说明
- 本教程主要介绍如何在仿真环境中使用turtlebot3进行自走避障例程
- 测试环境:
- Ubuntu 20.04 + ROS2 Foxy
- Ubuntu 24.04 + ROS2 Jazzy操作步骤
- 新开终端,启动gazebo
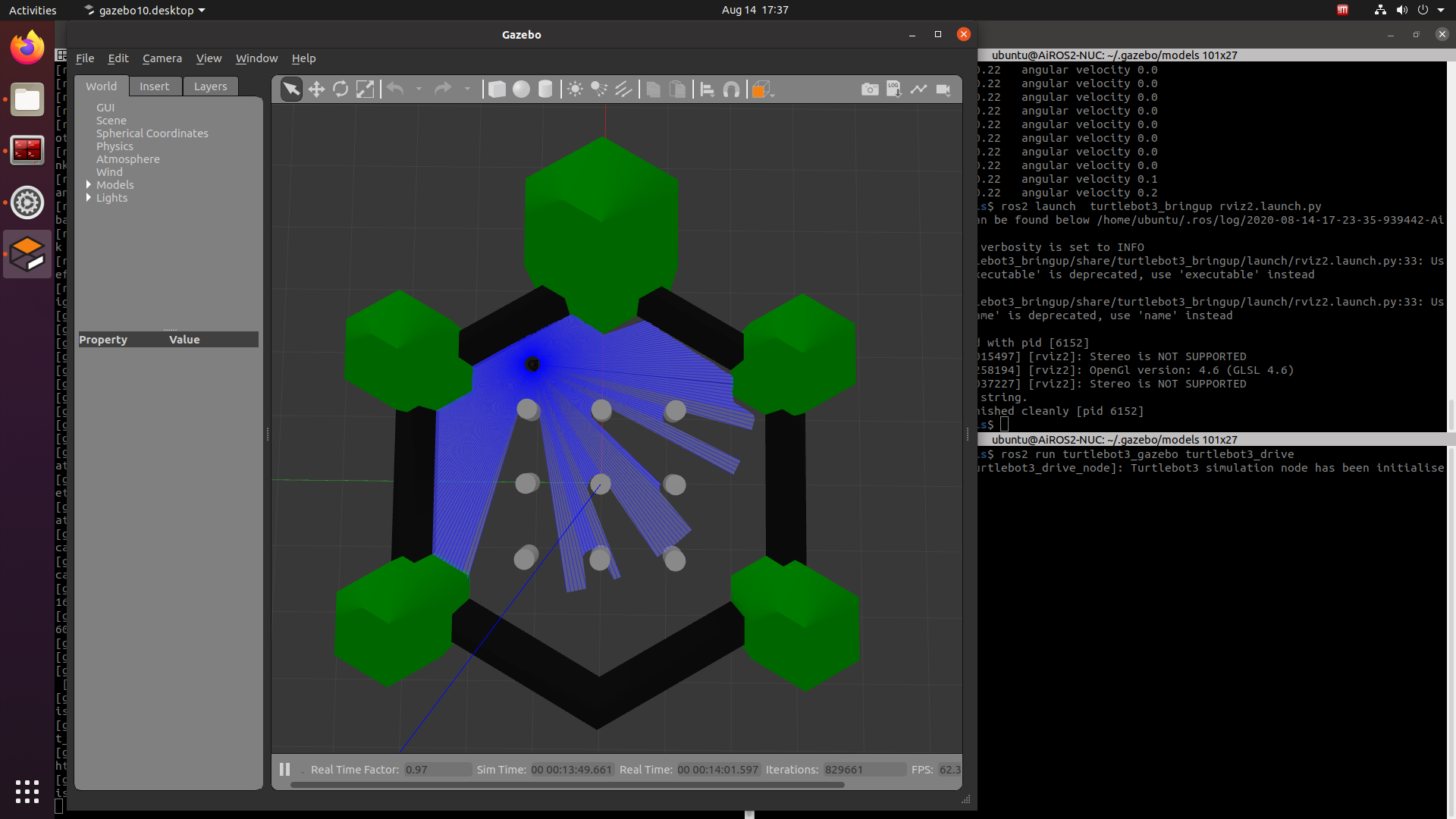
$ ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py- 新开终端,执行自走避障程序
$ ros2 run turtlebot3_gazebo turtlebot3_drive- 效果如下:
注意:当前最新官方代码中
turtlebot3_drive例程还没更新到jazzy版本,故会存在cmd_vel的TwistStamped类型问题,需要进行修改
演示视频
<iframe eight=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=114385397746308&bvid=BV1myLxzGEVN&cid=29563355816&p=1&high_quality=1&danmaku=0" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流