



















LeRobot-SO100入门教程-配置舵机id
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
-
介绍如何在LeRobot-SO100中配置舵机id
-
配置舵机id时,舵机控制板需要连接上12v电源
相关设备
- LeRobot-SO100套件:采购地址
步骤:
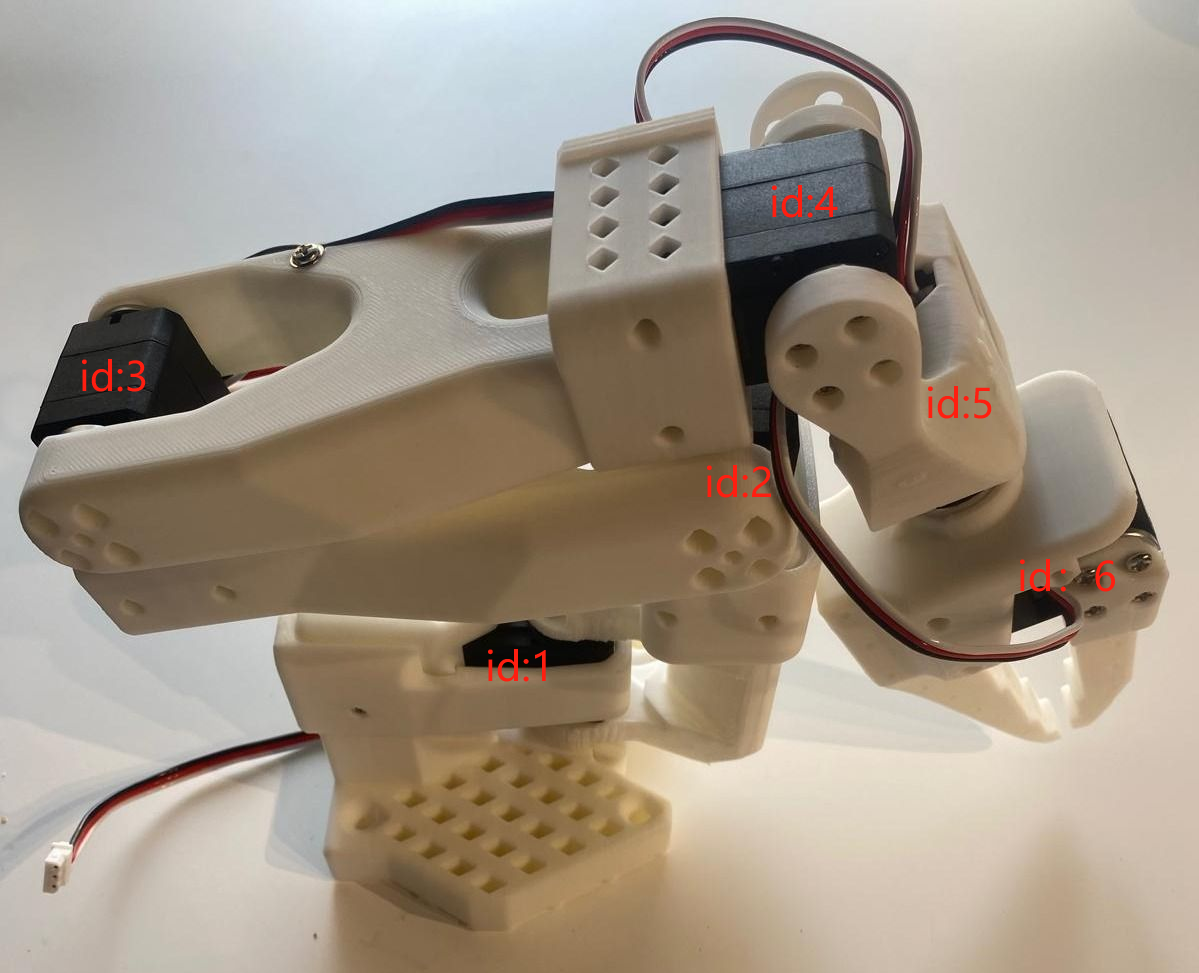
- LeRobot-SO100的舵机id
- 加载lerobot环境
conda activate lerobot- 查找的正确端口,插上usb口,运行以下程序
python ~/lerobot/lerobot/scripts/find_motors_bus_port.py- 先拔掉USB口,然后按下回车键。找到端口为/dev/ttyACM0
Finding all available ports for the MotorsBus.
Ports before disconnecting: ['/dev/tty', '/dev/tty0', '/dev/tty1', '/dev/tty2', '/dev/tty3', '/dev/tty4', '/dev/tty5', '/dev/tty6', '/dev/tty7', '/dev/tty8', '/dev/tty9', '/dev/tty10', '/dev/tty11', '/dev/tty12', '/dev/tty13', '/dev/tty14', '/dev/tty15', '/dev/tty16', '/dev/tty17', '/dev/tty18', '/dev/tty19', '/dev/tty20', '/dev/tty21', '/dev/tty22', '/dev/tty23', '/dev/tty24', '/dev/tty25', '/dev/tty26', '/dev/tty27', '/dev/tty28', '/dev/tty29', '/dev/tty30', '/dev/tty31', '/dev/tty32', '/dev/tty33', '/dev/tty34', '/dev/tty35', '/dev/tty36', '/dev/tty37', '/dev/tty38', '/dev/tty39', '/dev/tty40', '/dev/tty41', '/dev/tty42', '/dev/tty43', '/dev/tty44', '/dev/tty45', '/dev/tty46', '/dev/tty47', '/dev/tty48', '/dev/tty49', '/dev/tty50', '/dev/tty51', '/dev/tty52', '/dev/tty53', '/dev/tty54', '/dev/tty55', '/dev/tty56', '/dev/tty57', '/dev/tty58', '/dev/tty59', '/dev/tty60', '/dev/tty61', '/dev/tty62', '/dev/tty63', '/dev/ttyS0', '/dev/ttyS1', '/dev/ttyS2', '/dev/ttyS3', '/dev/ttyS4', '/dev/ttyS5', '/dev/ttyS6', '/dev/ttyS7', '/dev/ttyS8', '/dev/ttyS9', '/dev/ttyS10', '/dev/ttyS11', '/dev/ttyS12', '/dev/ttyS13', '/dev/ttyS14', '/dev/ttyS15', '/dev/ttyS16', '/dev/ttyS17', '/dev/ttyS18', '/dev/ttyS19', '/dev/ttyS20', '/dev/ttyS21', '/dev/ttyS22', '/dev/ttyS23', '/dev/ttyS24', '/dev/ttyS25', '/dev/ttyS26', '/dev/ttyS27', '/dev/ttyS28', '/dev/ttyS29', '/dev/ttyS30', '/dev/ttyS31', '/dev/ttyprintk', '/dev/ttyACM0']
Remove the USB cable from your MotorsBus and press Enter when done.
The port of this MotorsBus is '/dev/ttyACM0'
Reconnect the USB cable.- 增加权限
sudo chmod 777 /dev/ttyACM0- 配置舵机id为1,如此类推,配置id 1~6,需要配置参数port 端口,对应的ID
python3 ~/lerobot/lerobot/scripts/configure_motor.py \
--port /dev/ttyACM0 \
--brand feetech \
--model sts3215 \
--baudrate 1000000 \
--ID 1- 上面执行程序的参数含义:
--port /dev/ttyACM0 :连接的串口设备
--brand feetech \ : 电机的品牌
--model sts3215 \ : 电机的型号
--baudrate 1000000 \ : 串口通信的波特率
--ID 1 : 指定电机的 ID- 结果如下:
Scanning all baudrates and motor indices
100%|█████████████████████████████████████████████████████████████████| 9/9 [00:00<00:00, 16.32it/s]
Motor index found at: 2
Setting its index to desired index 1
Present Position [2046]
Offset [0]
Disconnected from motor bus.联合测试
- 当所有舵机配置好ID之后,把舵机都串联起来,运行自检程序,确保所有舵机都能正常工作。
- 让舵机从1开始,先正向旋转,再复位,确认每个舵机都能正常运行。
命令待完善演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=114425646286217&bvid=BV1knGRz6Eaj&cid=29713762220&p=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号