



















Jetbot-AI机器人教程-硬件组装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Jetbot-AI机器人教程-硬件组装
说明:
- 介绍如何组装Jetbot机器人
所需工具:

步骤1 - 清理3D件:

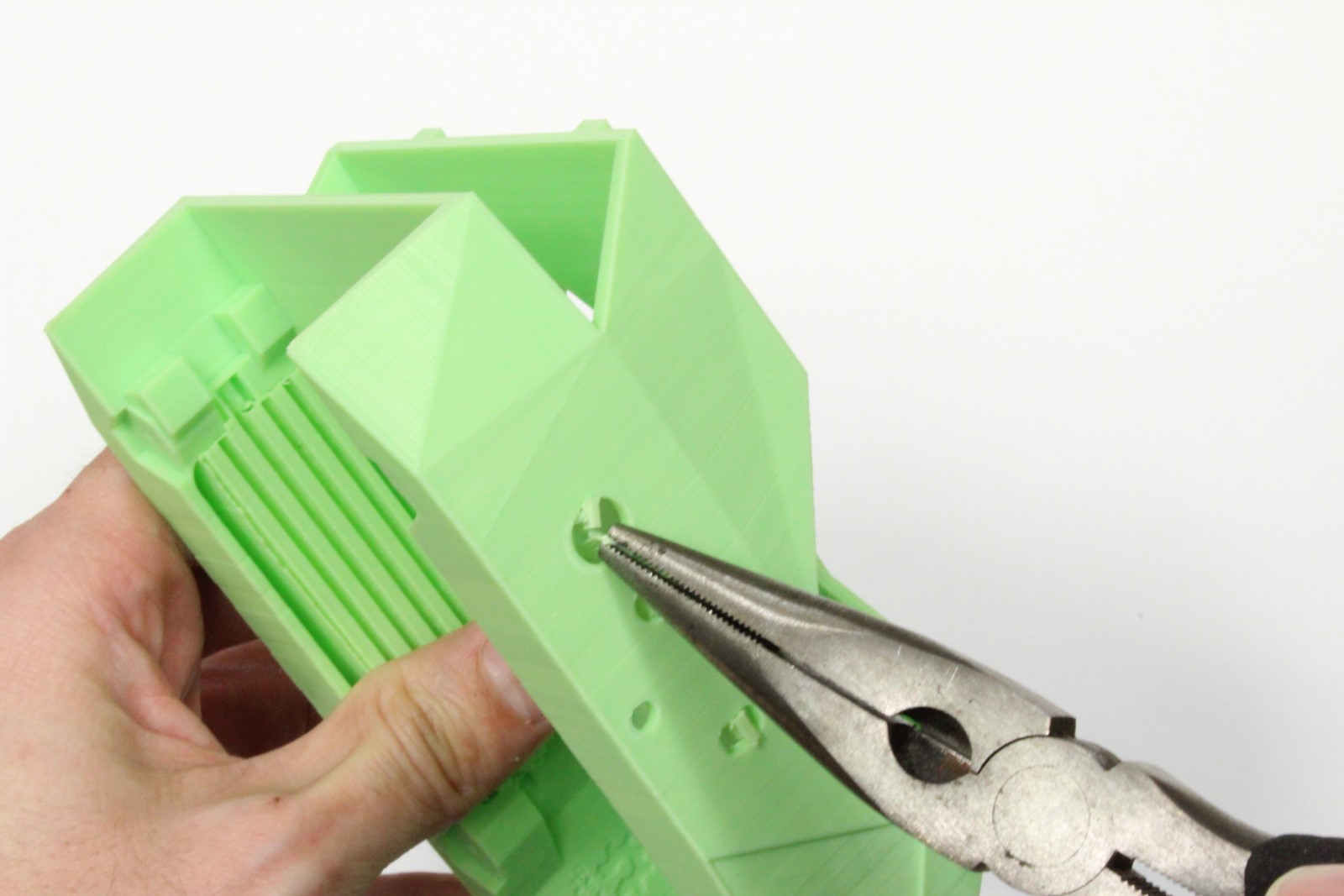
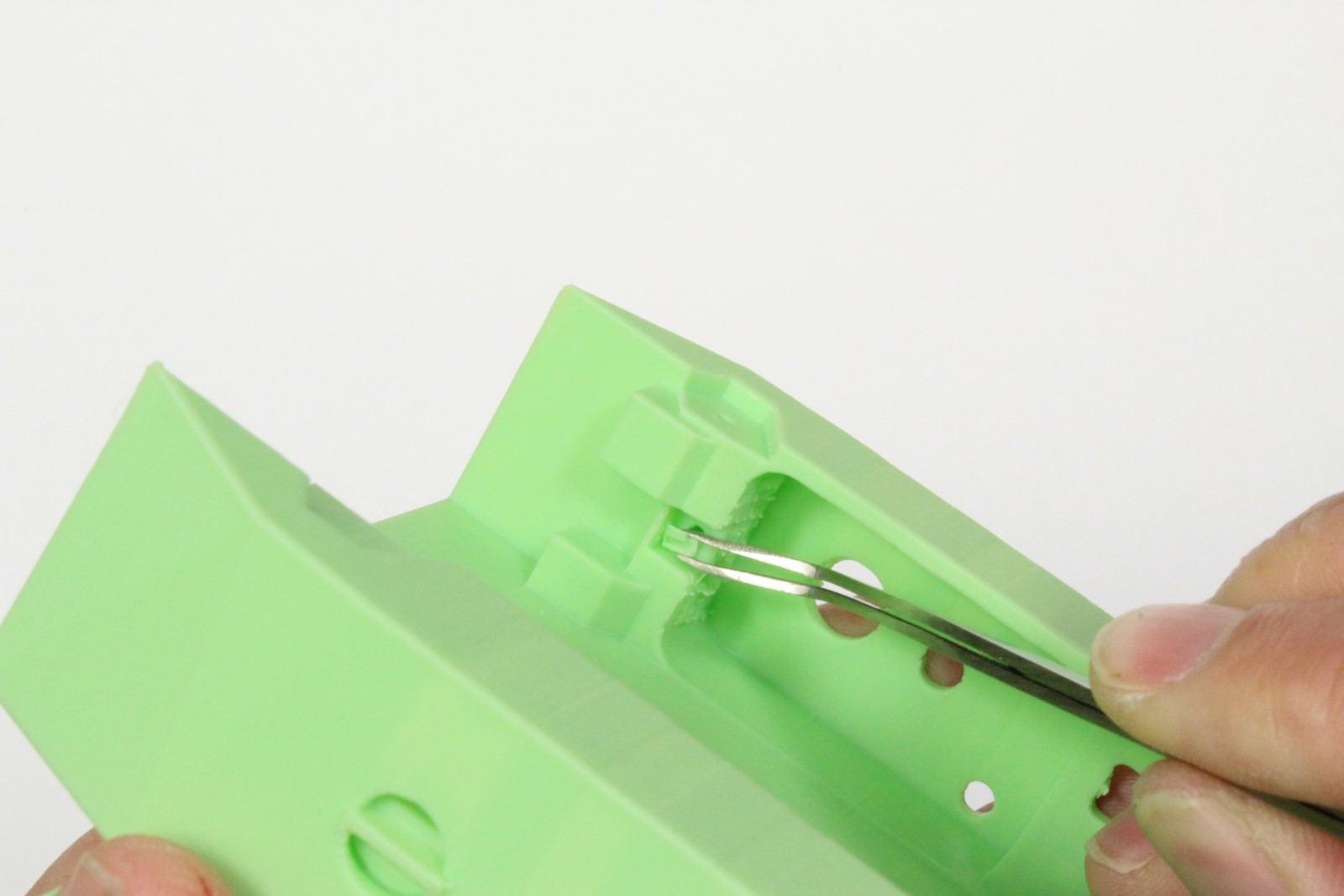
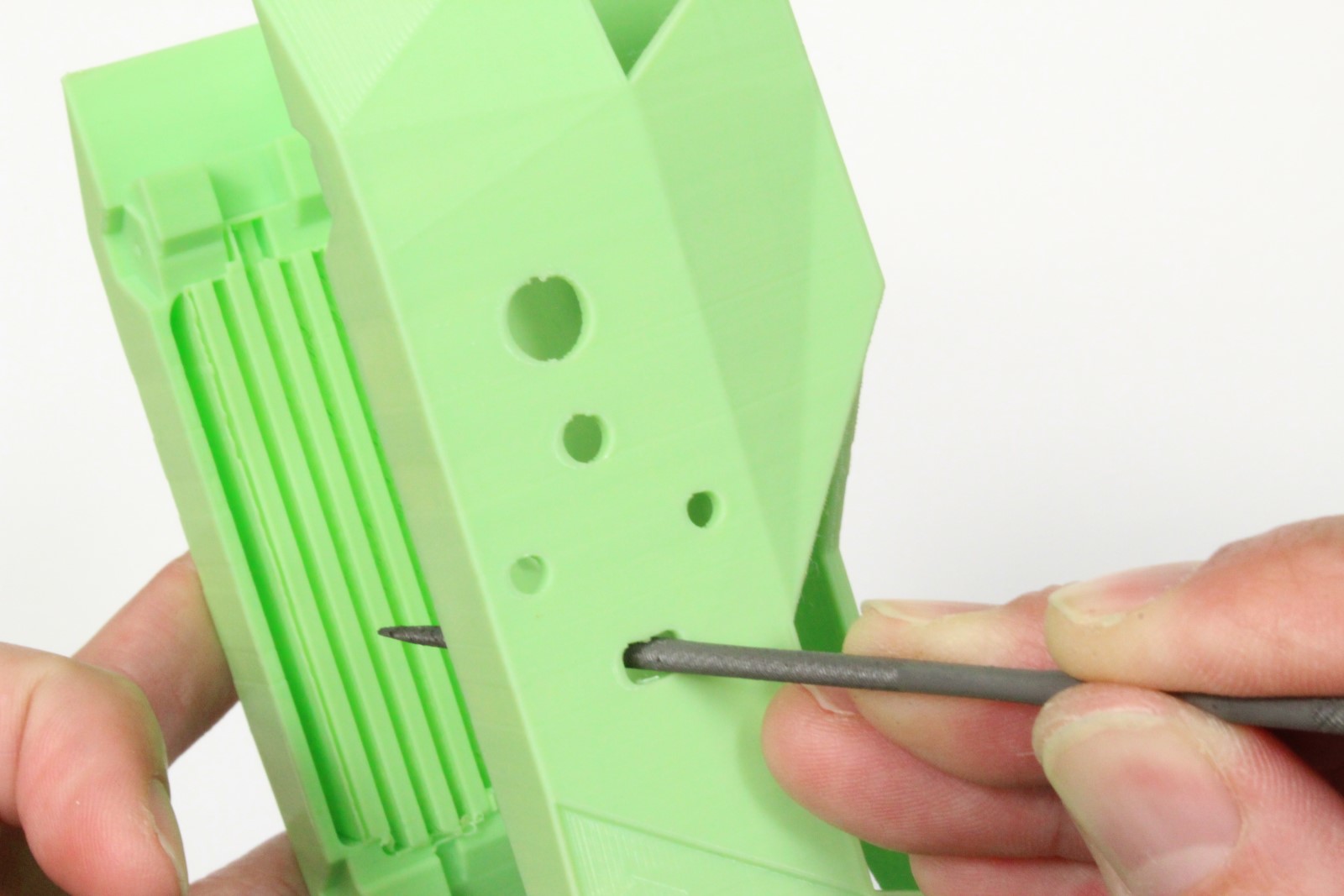

- 使用钳子从电机插座上卸下支撑材料
- 使用钳子,镊子和/或指甲从所有表面,开口和螺孔中取出支撑材料
- 如果太紧,请从开口处取出材料
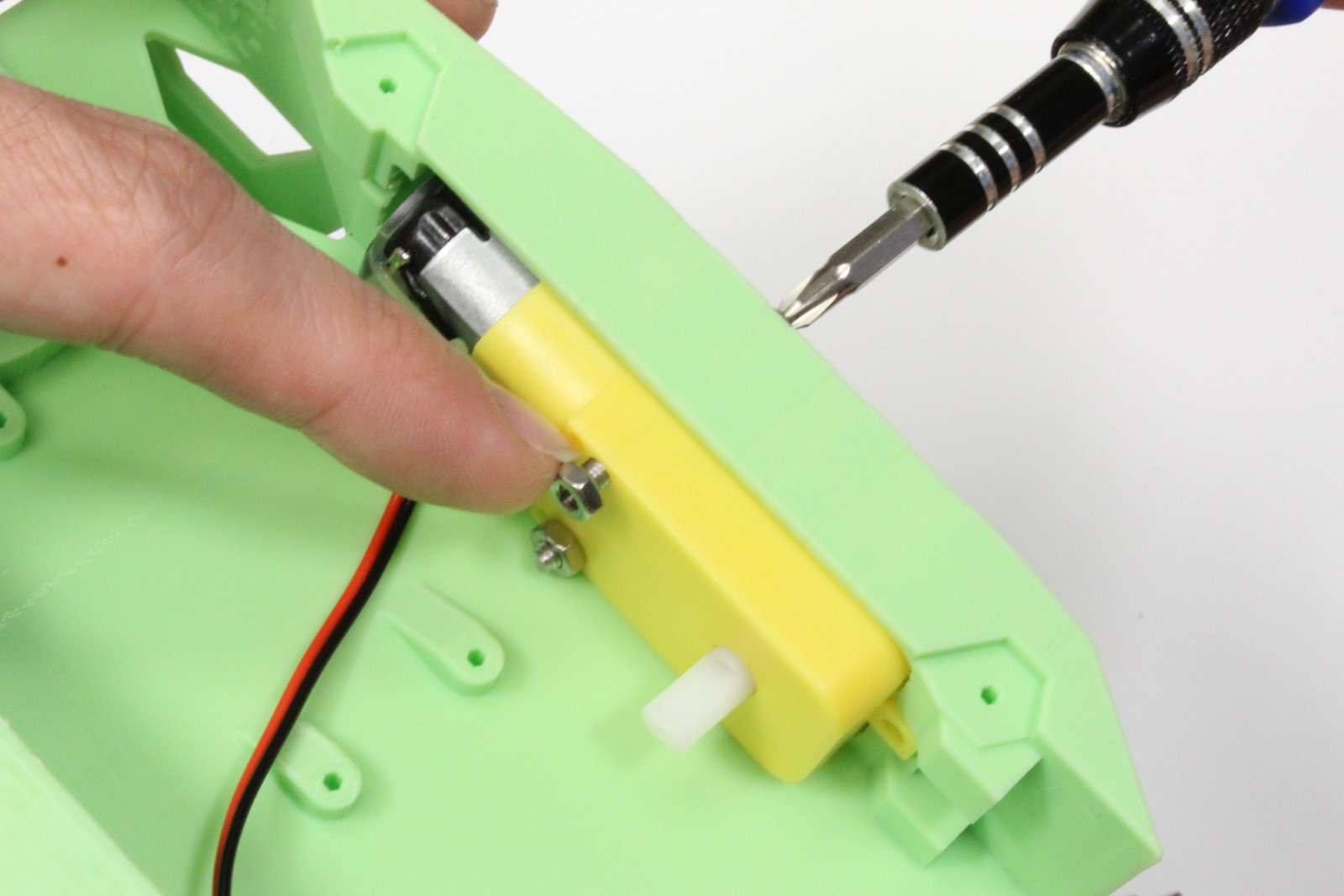
步骤2 - 安装电机:

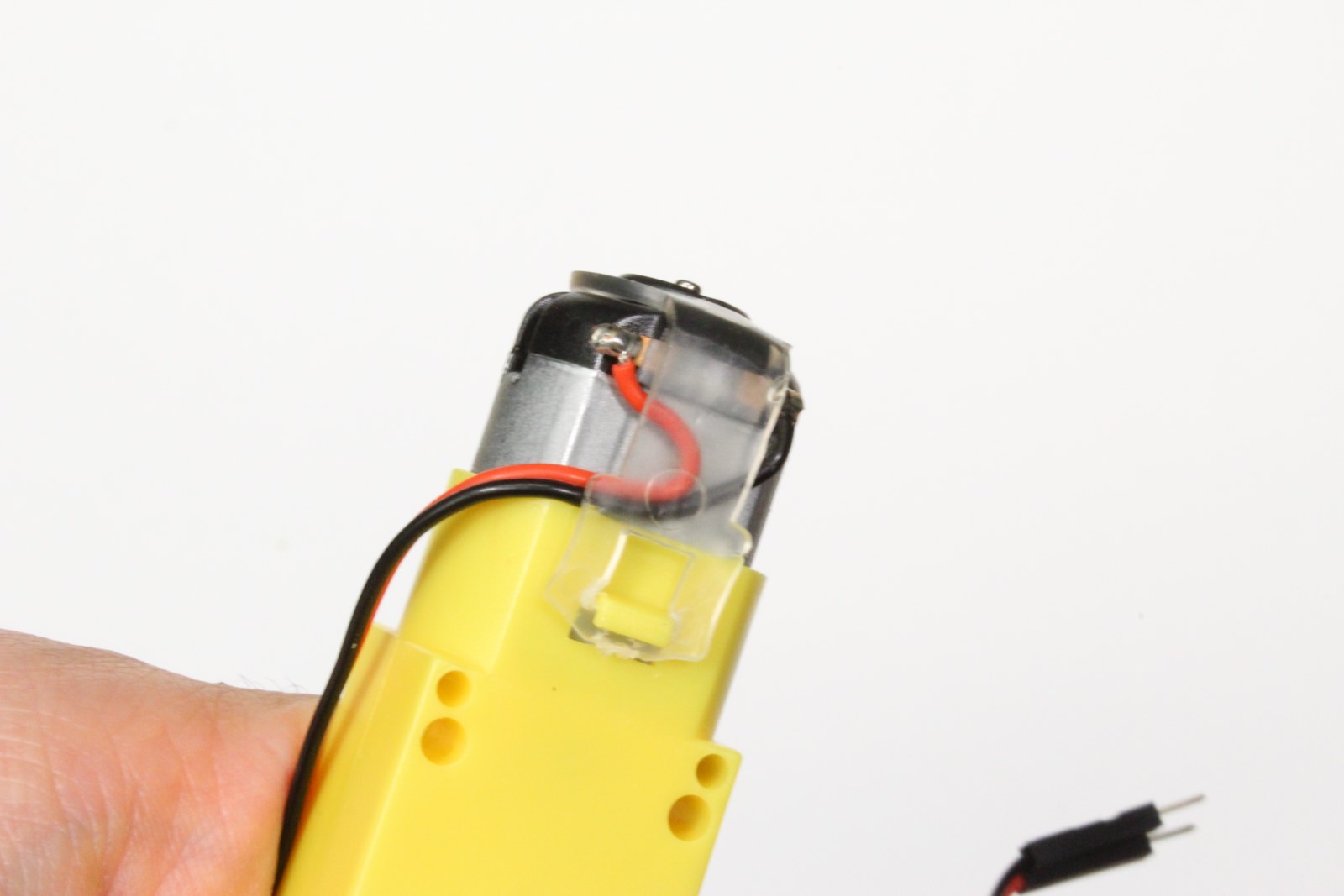
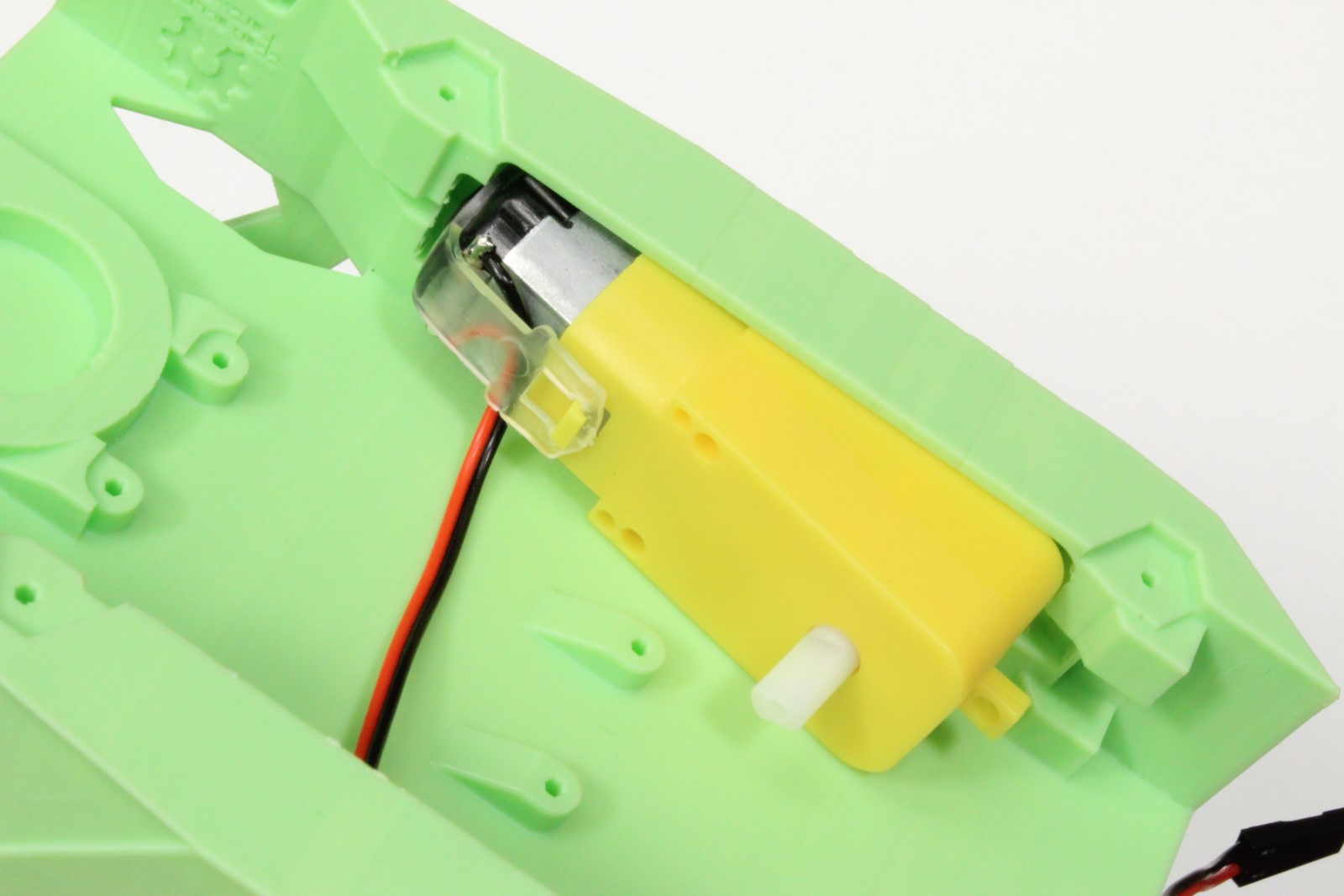
- 切断并取下每个电机的拉链
- 将电线塞在透明带下面,以防止焊点受到压力
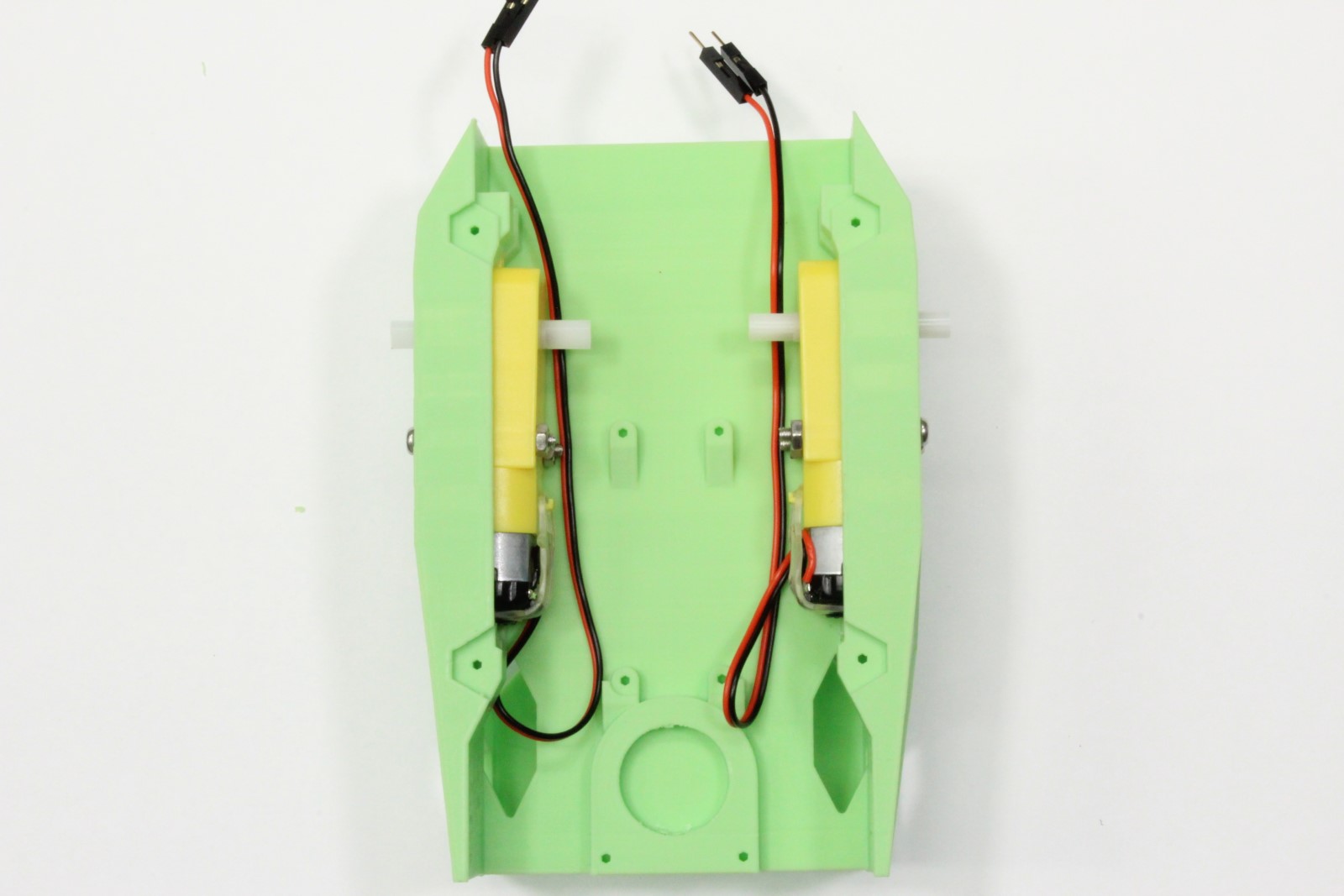
- 将每个电机插入3D打印机箱
- 使用2个M3x25mm螺钉固定每个电机
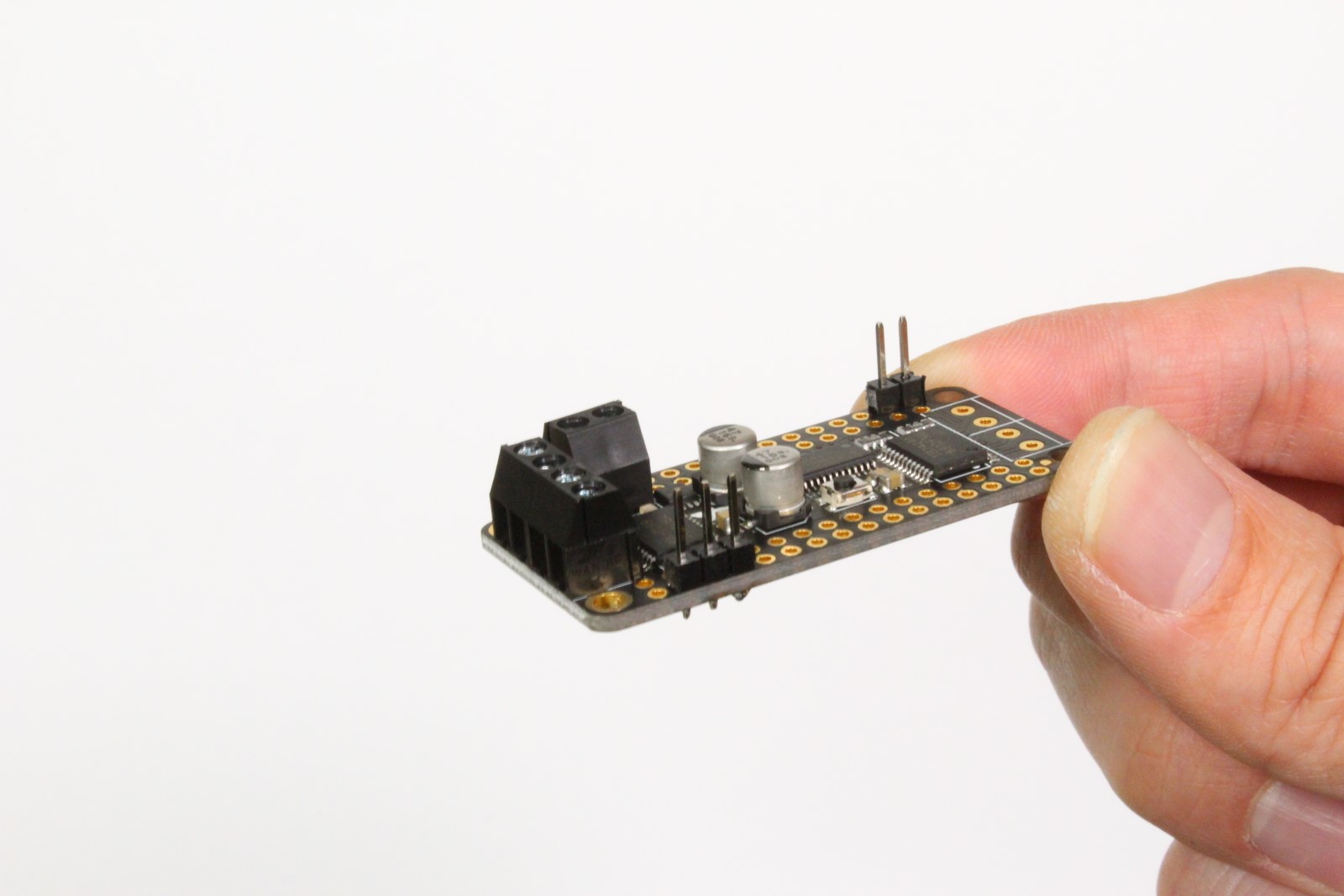
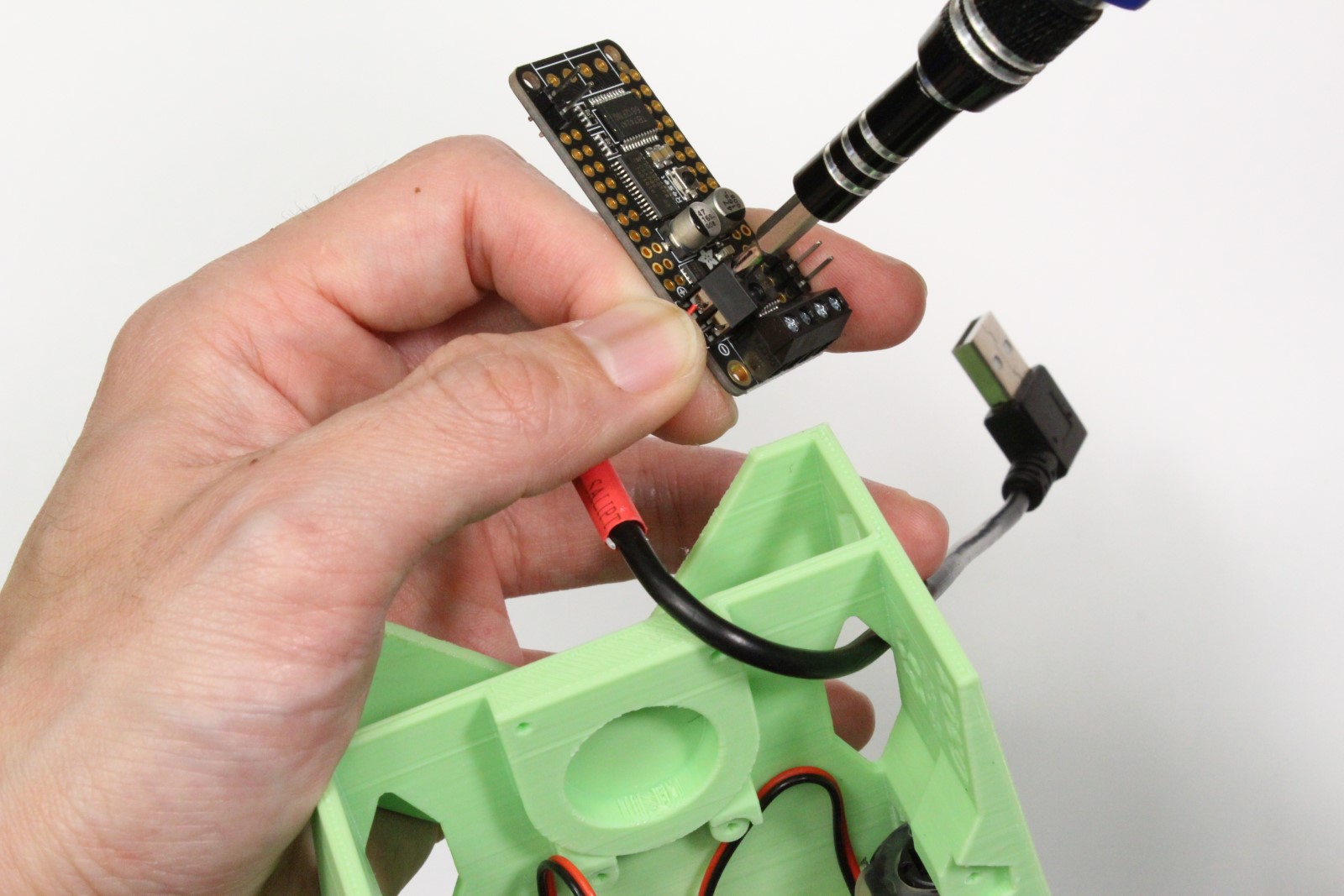
步骤3 - 焊接电机驱动器

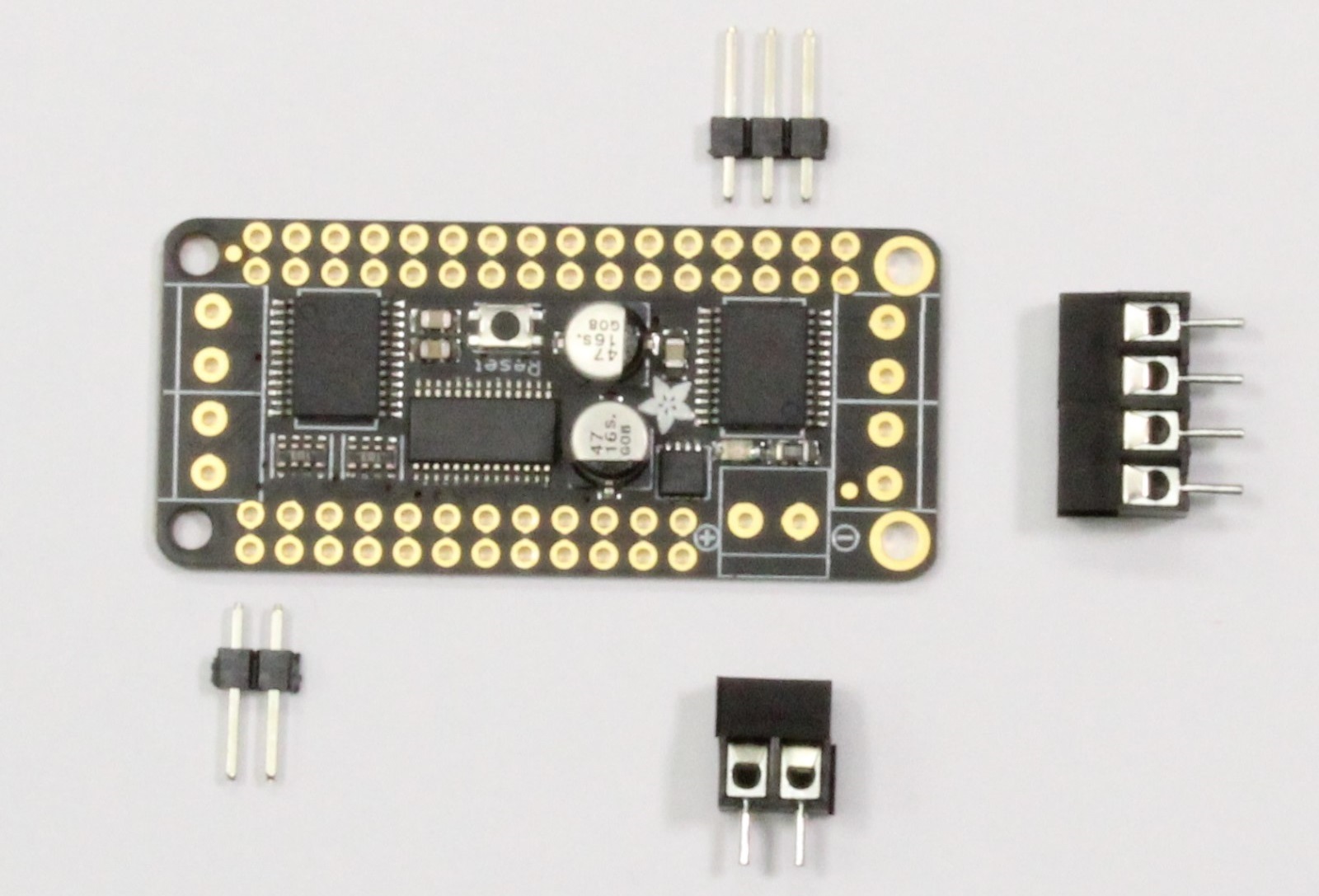
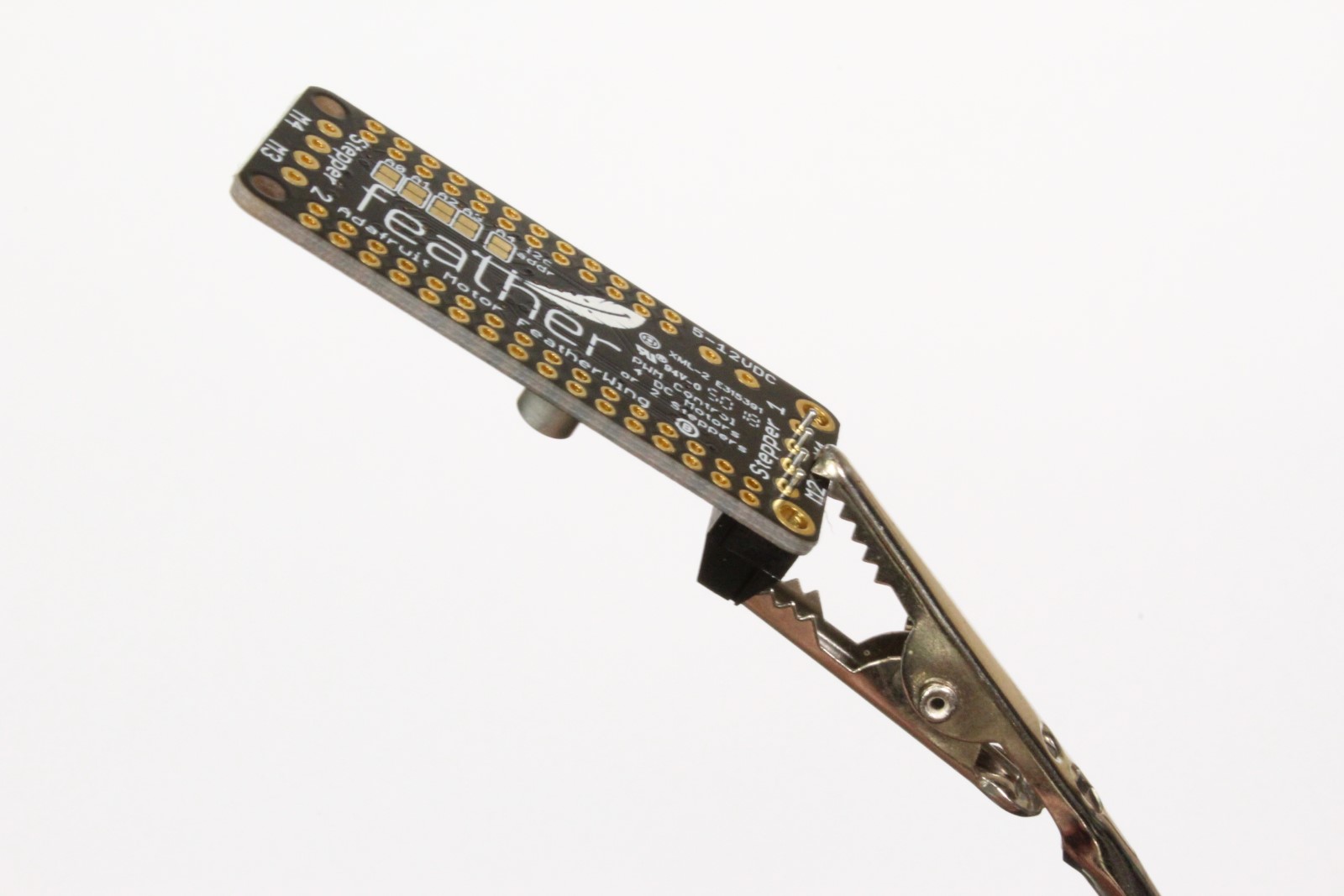
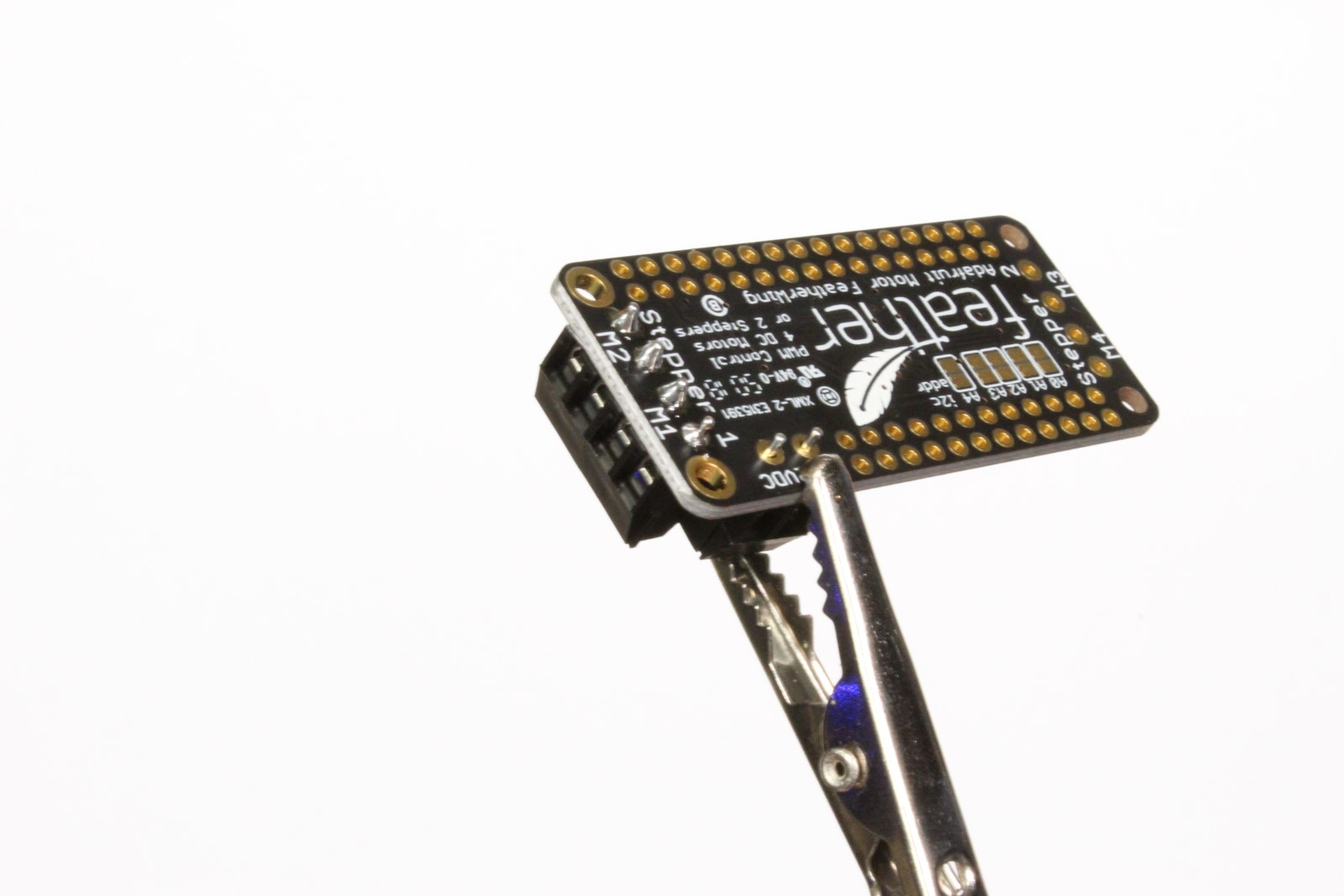
- 从电机驱动器包附带的插头连杆中拆下3针和2针公头
- 连接两个螺钉接线端子,以创建一个4针螺钉端子
- 将2针和4针螺钉端子焊接到电机驱动器上
- 将2针和3针公头连接器焊接到电机驱动器上
- 请注意3针接头的位置。 它从拐角处偏移了1针。
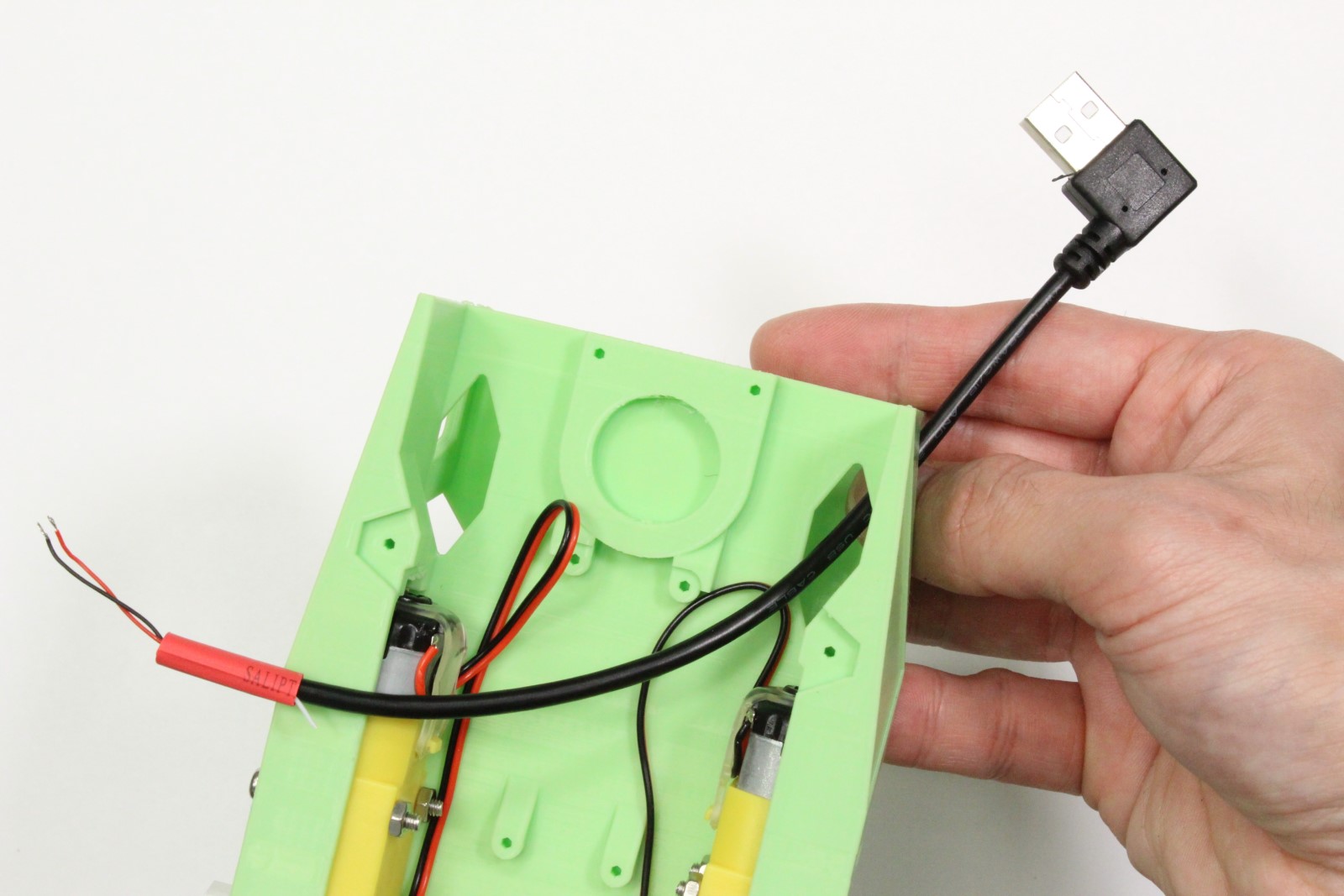
步骤4 - 剥去电机驱动器电源线

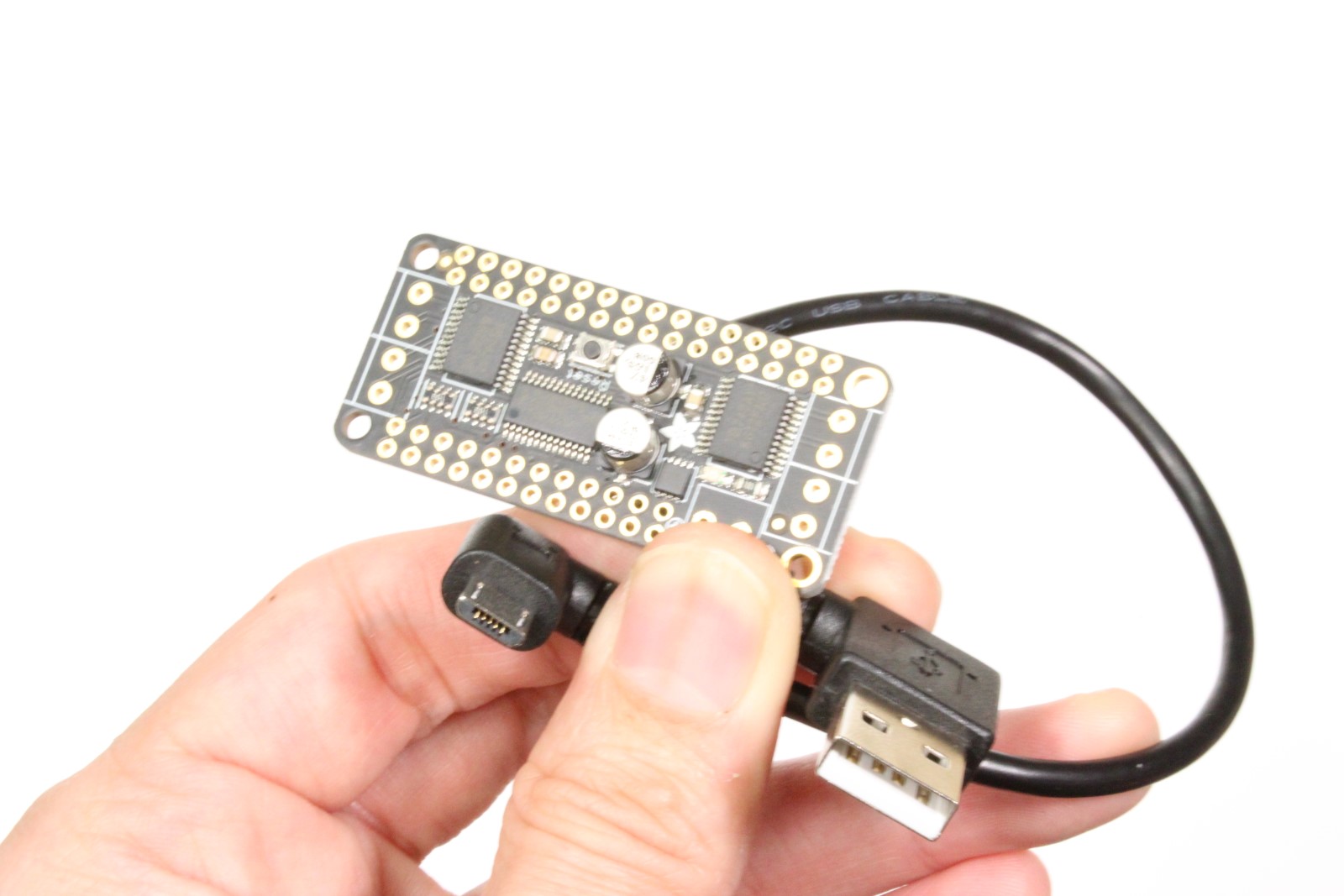

- 从包中选择所描绘的微型USB
- 注意图像。 电缆不相同。 另一条微型USB电缆将用于为Jetson Nano供电。
- 使用错误的Nano电源线将阻止其以太网端口。
- 将描绘的电缆从A型端子切割约20cm
- 剥去距离切口约3cm的橡胶涂层
- 去掉绿色/白色电线和金属屏蔽层。
- 将红色和黑色电线剥离约5mm的距离
- (可选)扭转暴露的绞合线并用焊料涂覆
步骤5 - 安装电机驱动器
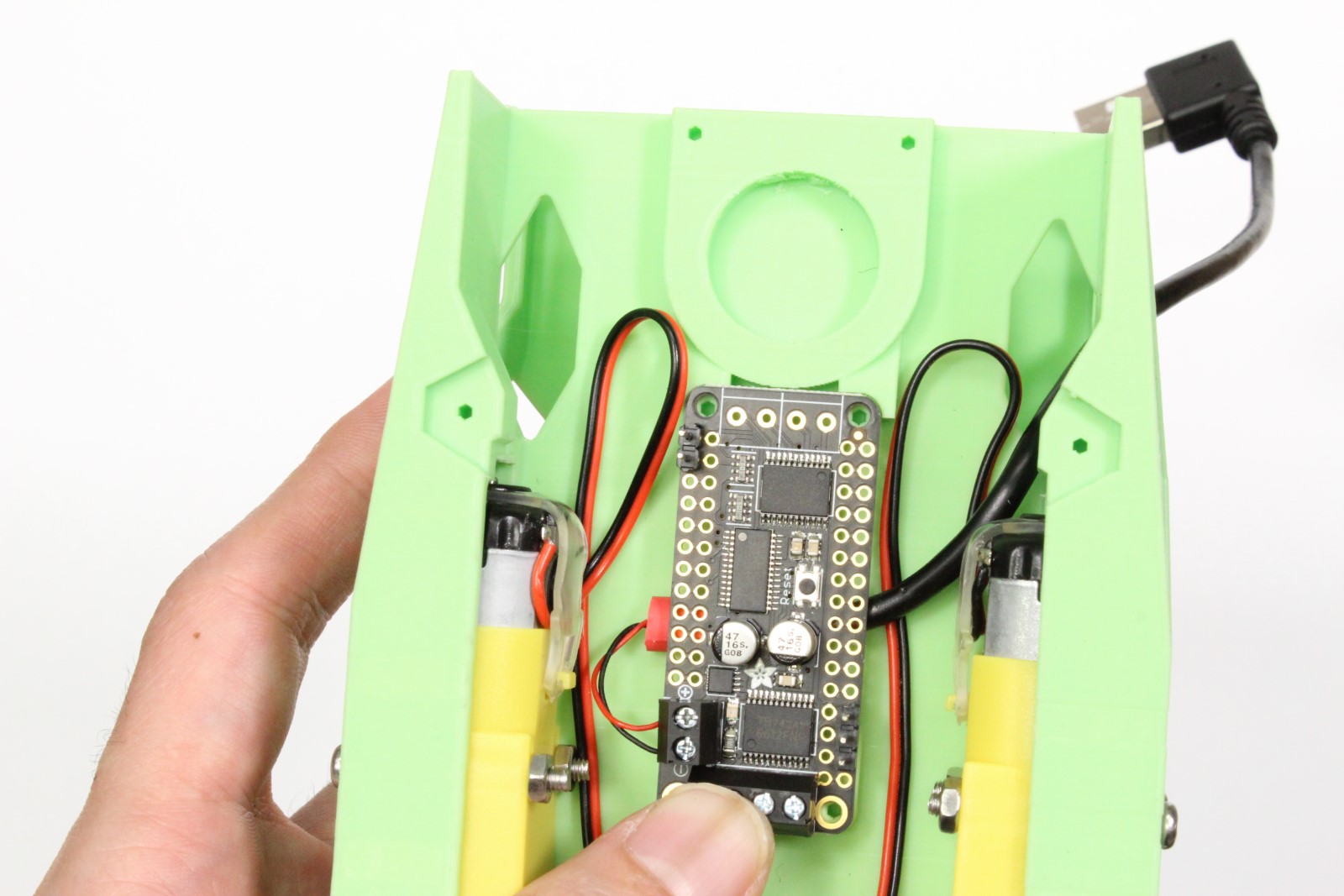
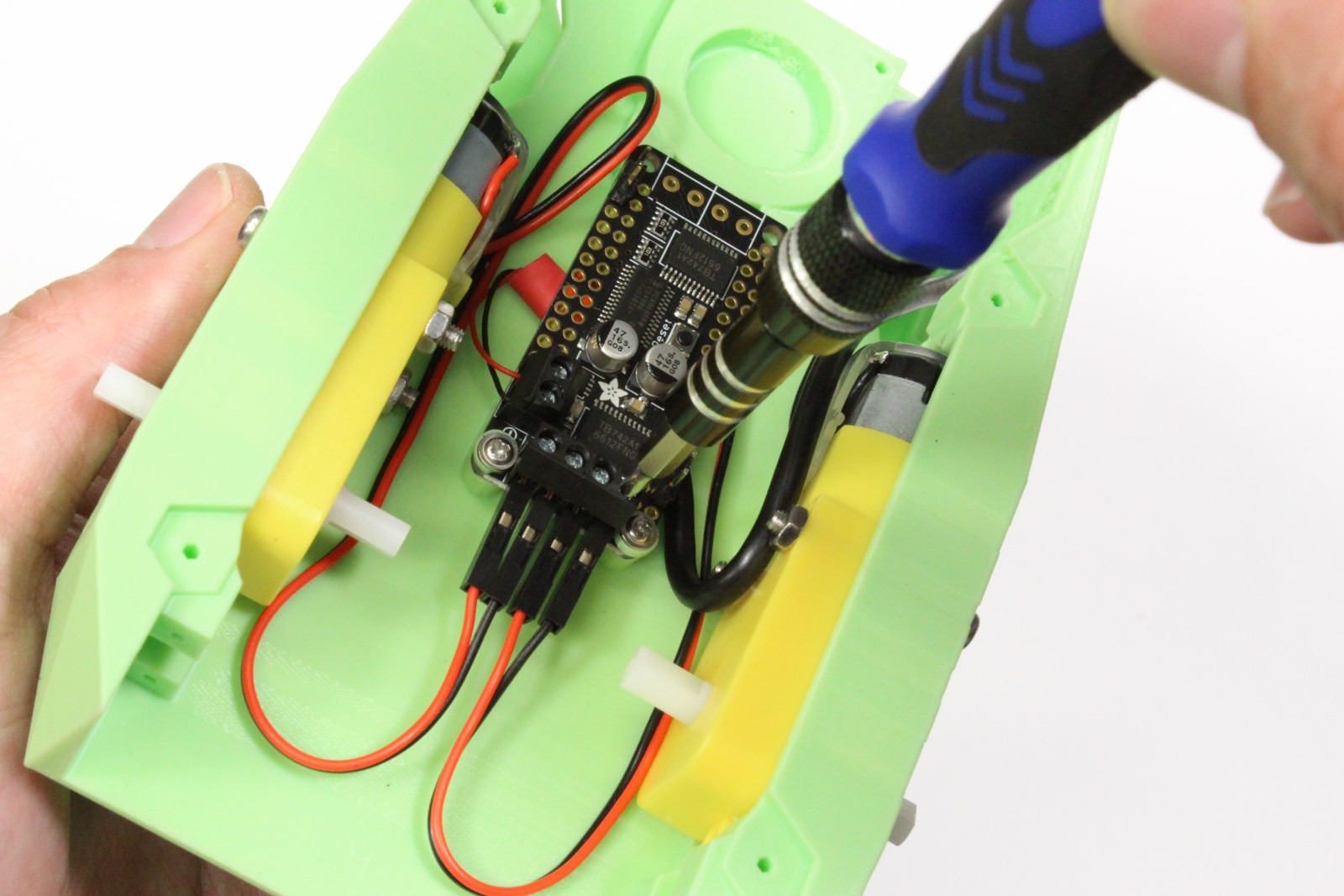
- 将拼接电缆穿过机箱
- 将暴露的红色(+)和黑色( - )电线固定到电机驱动器上的电源端子
- 注意电机驱动器上的标记。 接线错误可能会损坏驱动器。
- 将拼接电缆布置在电机驱动器下方,以组织和防止螺钉端子上的压力
- 使用自攻螺钉将电机驱动器固定到机箱
- 将左右电机线固定在电机螺丝端子上
- 注意事项(3/11/2019):我们犯了一个小错误:左右电机的红色和黑色电线实际上是在上图所示的图像中翻转过来的。
- 这不会造成损坏,但电机会向后旋转。 请将它们翻转到正确的方向。
步骤6 - 安装WiFi天线
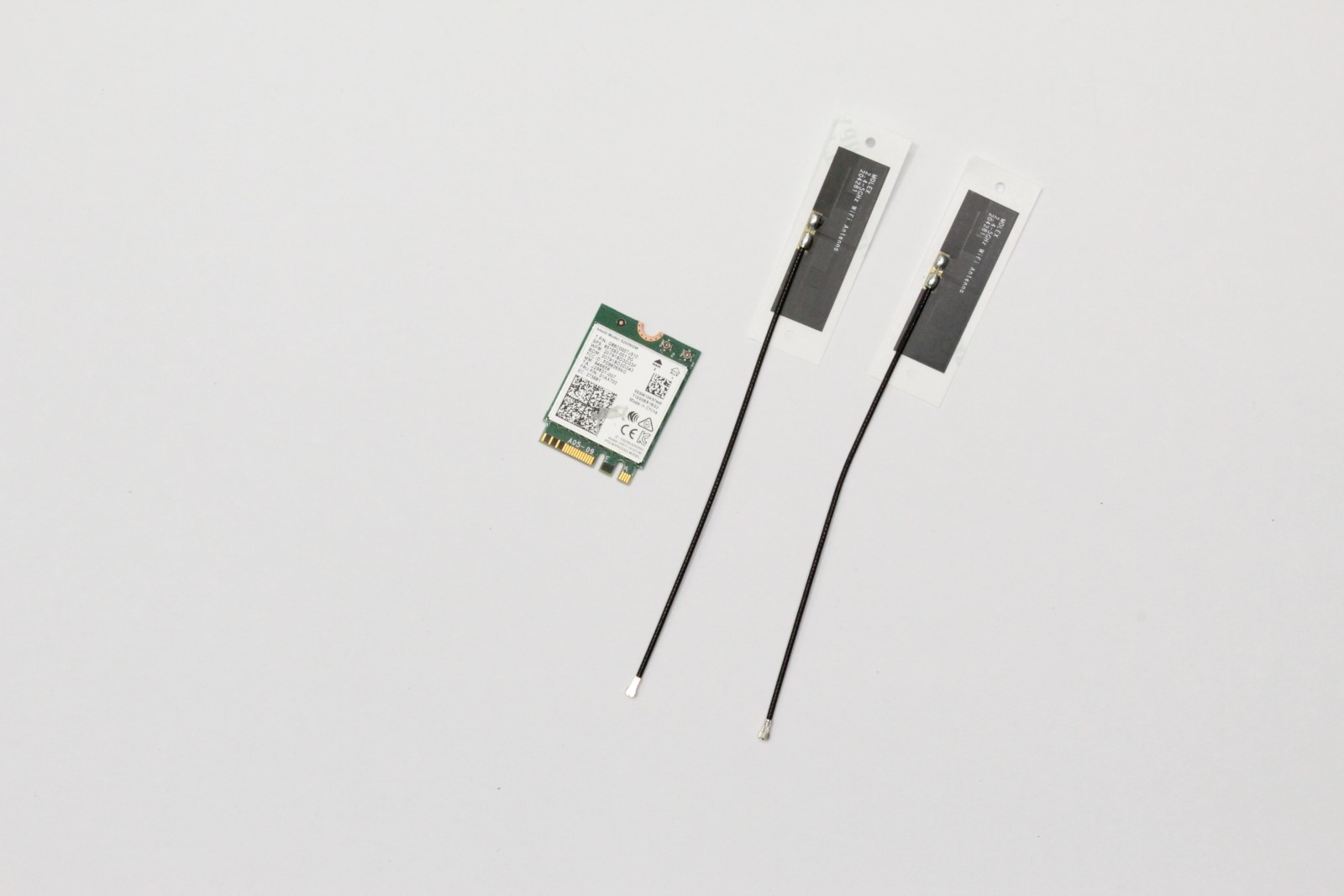
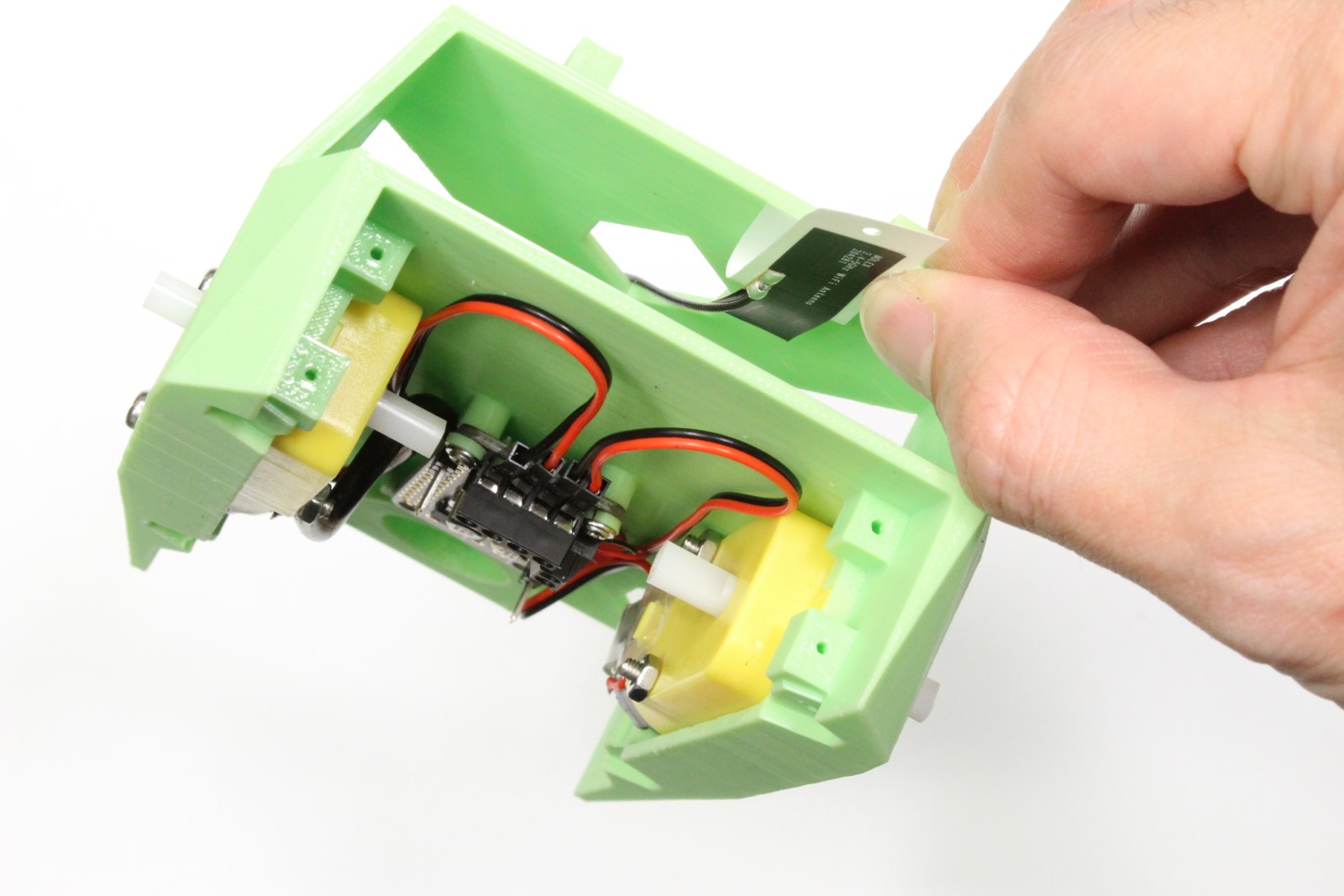
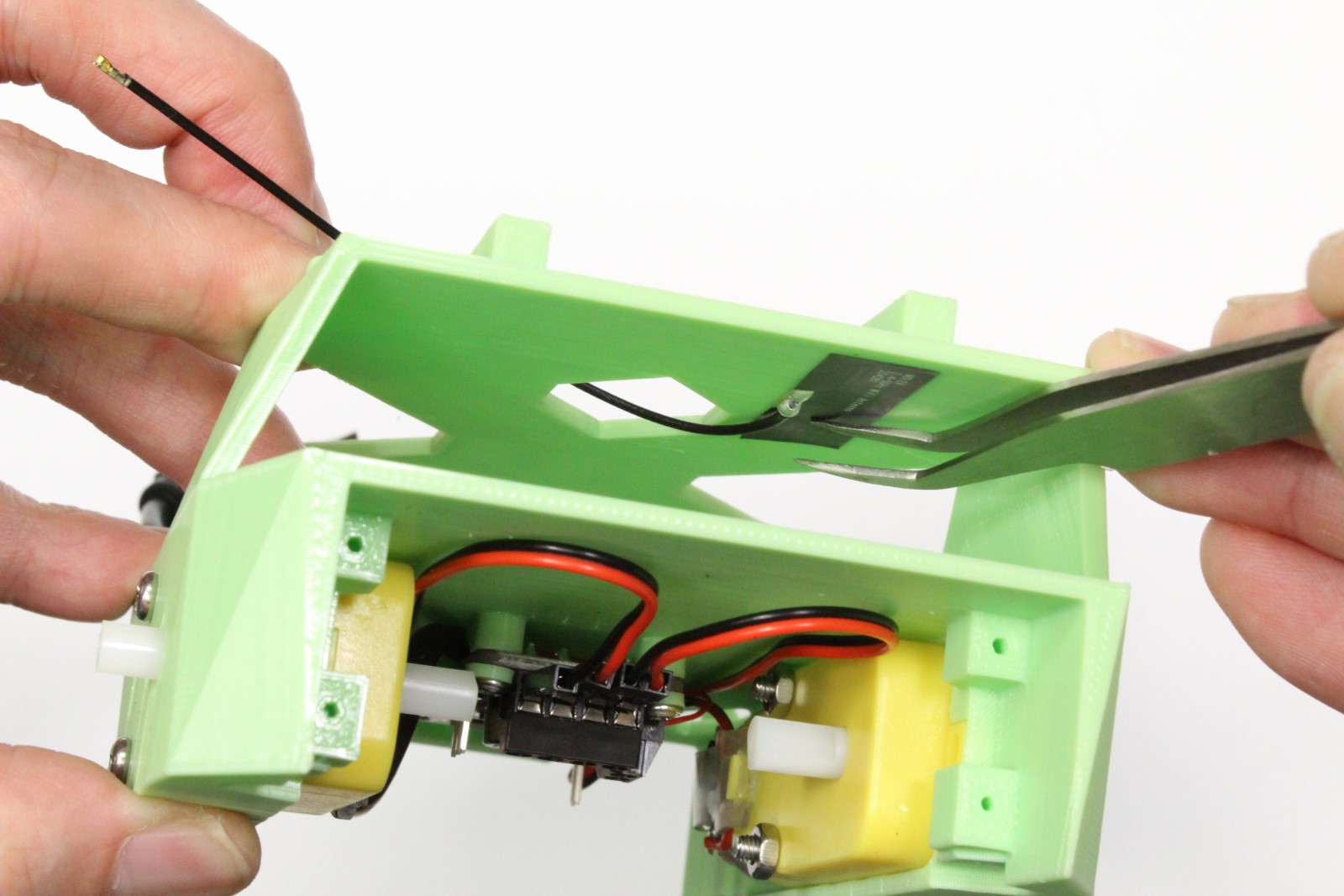
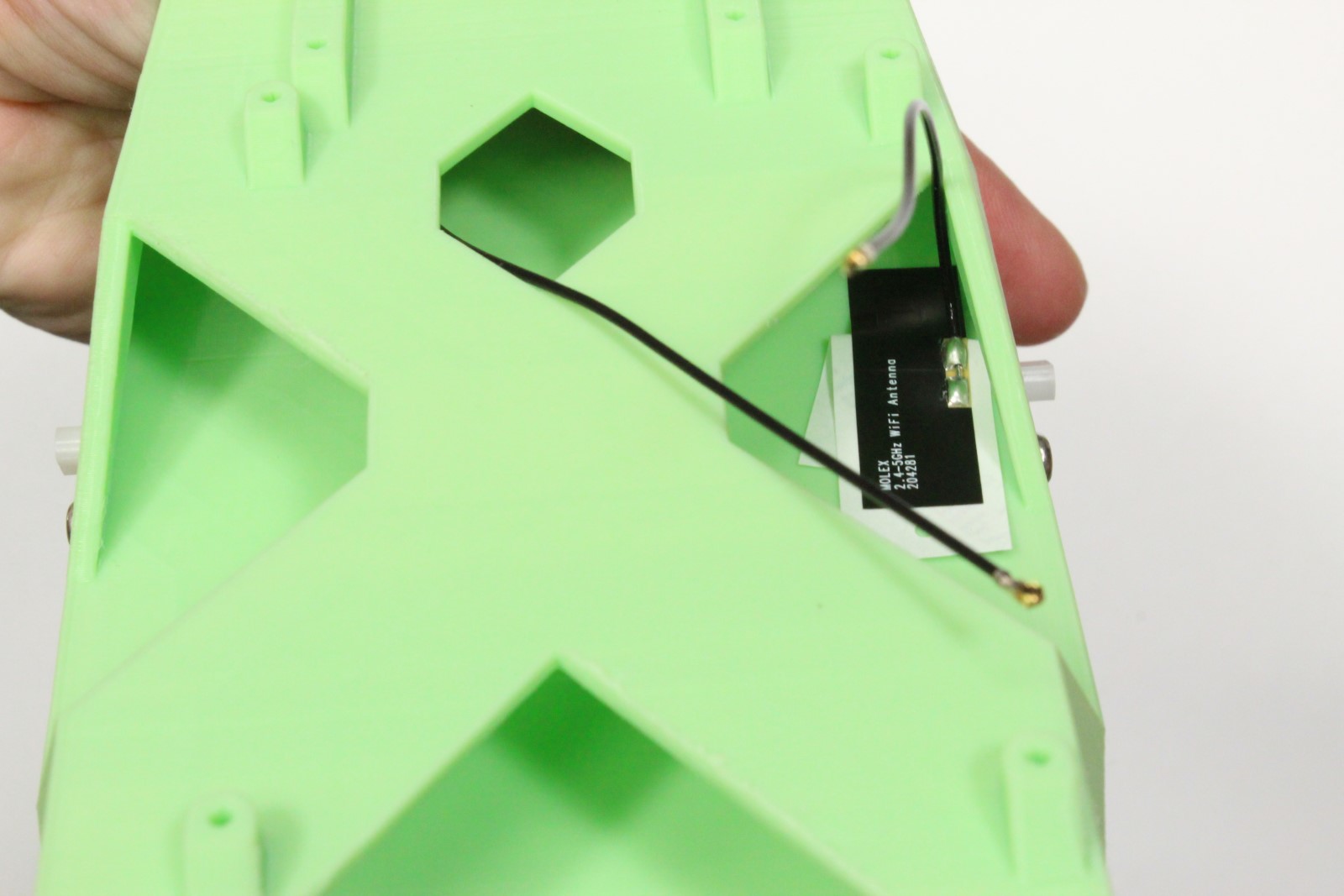
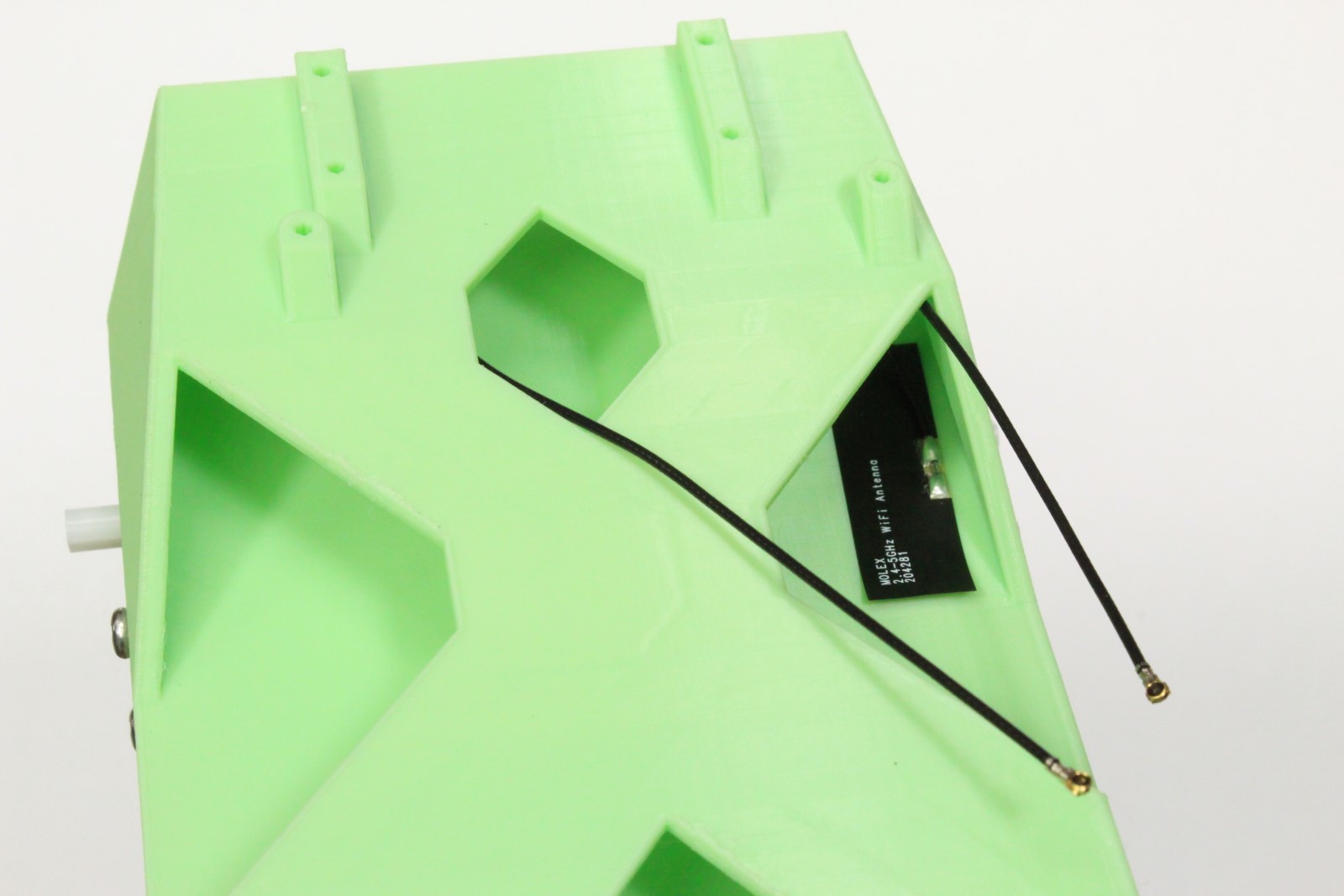
- 将一个贴片天线固定到顶板的下侧
- 将另一个贴片天线固定在电池托架的边缘
- 如图所示布线连接器
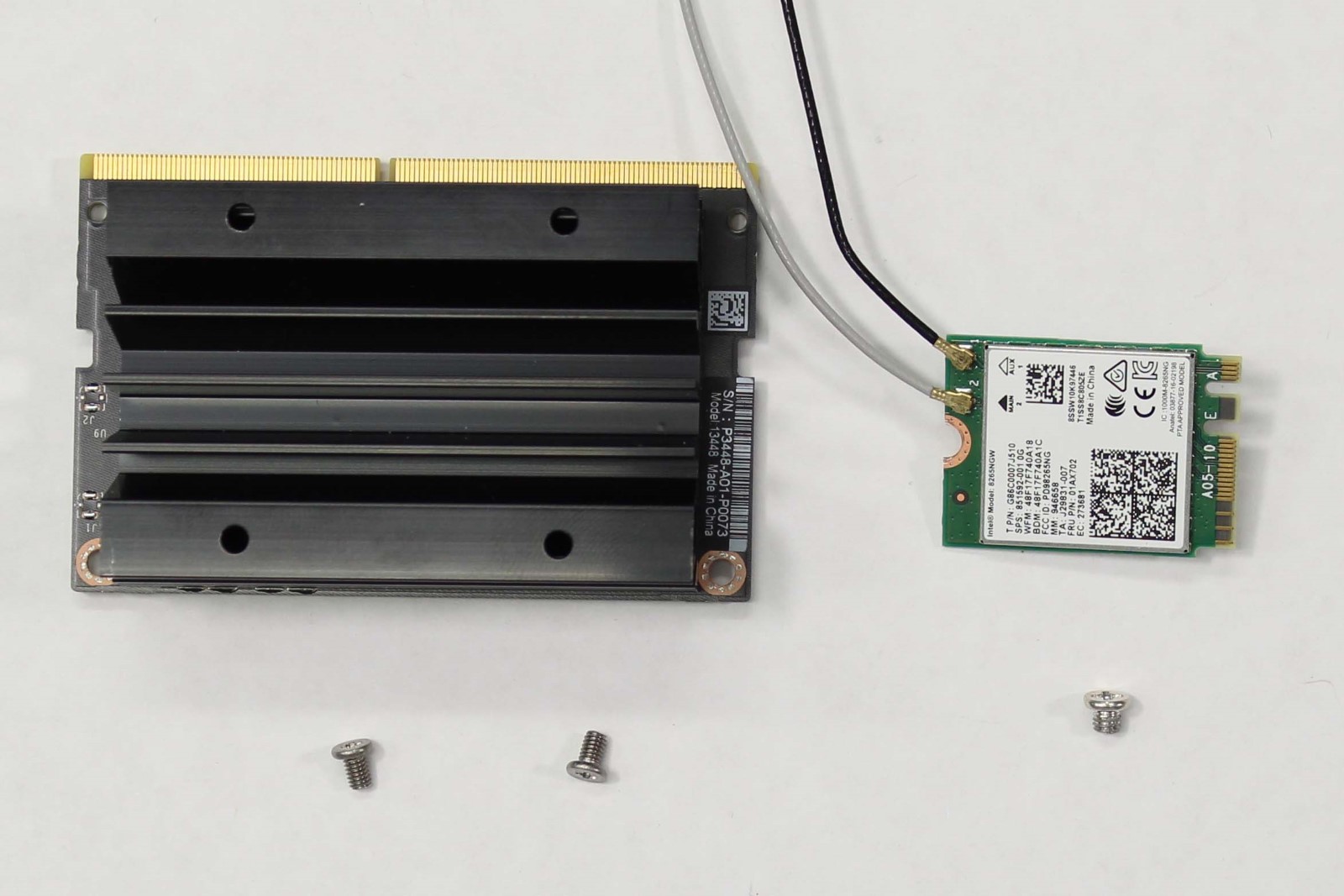
步骤6 - 从开发板去掉扇热模块
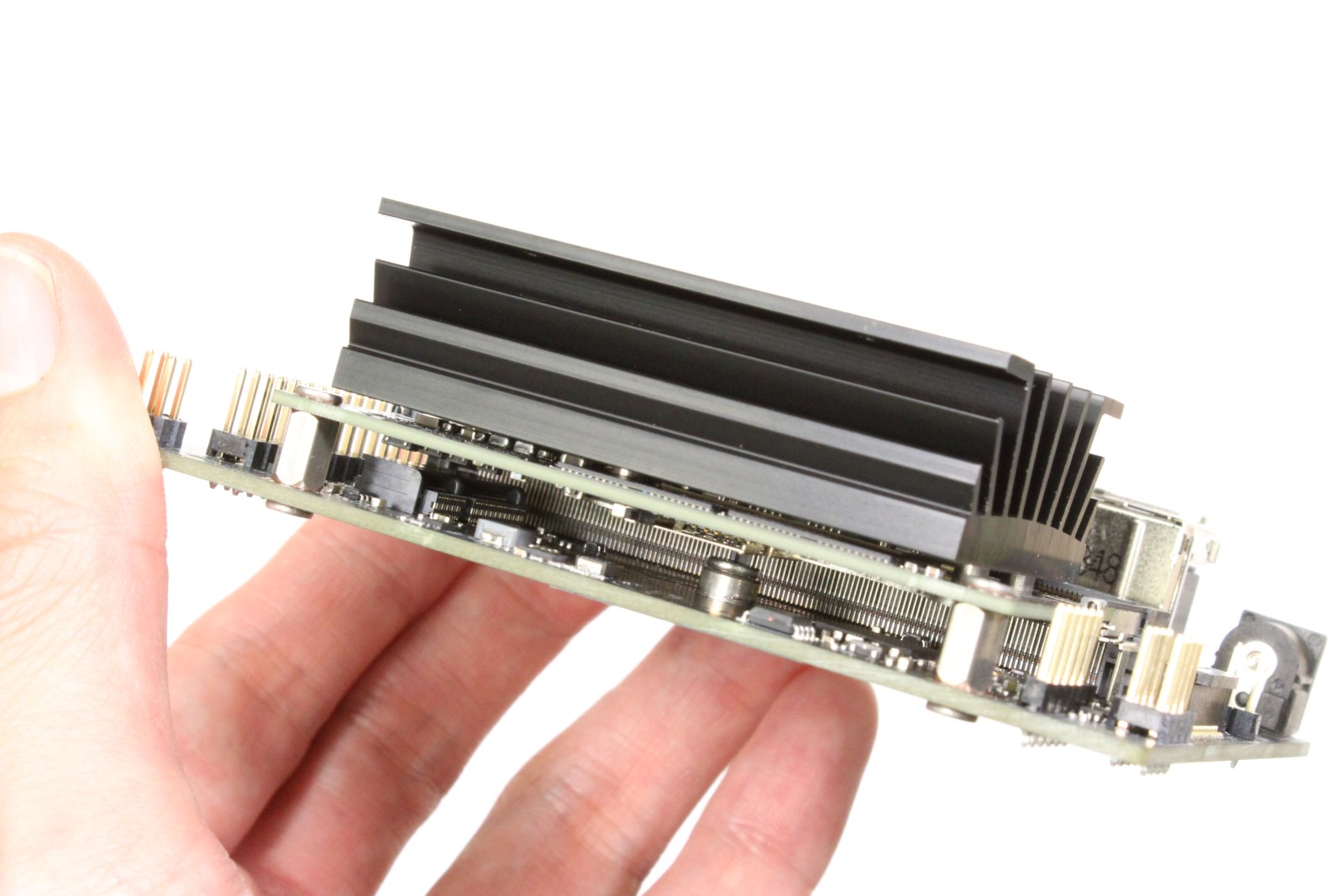
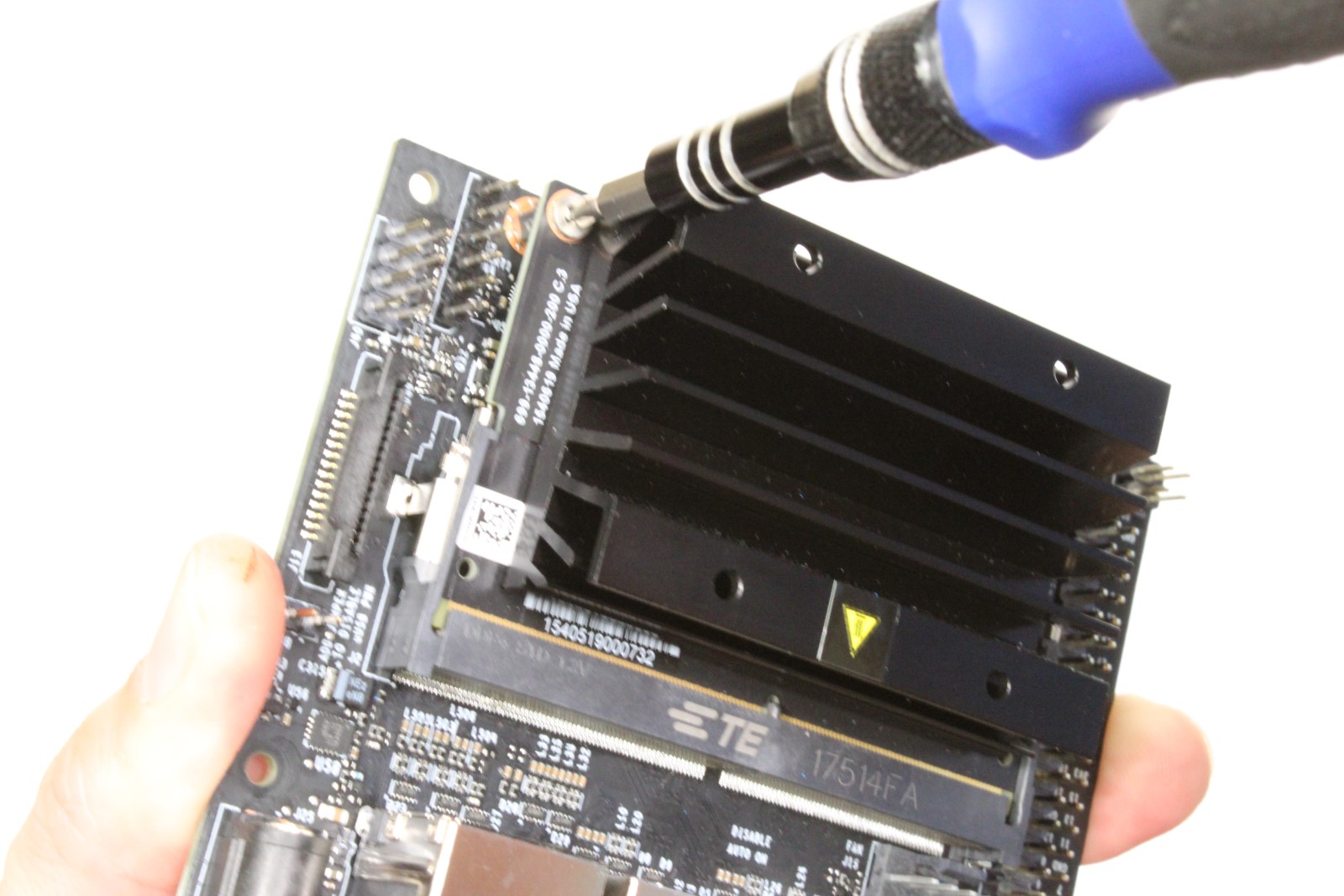


- 从Jetson Nano模块上卸下支架螺钉
- 用手松开SODIMM连接器的侧锁
- 将Jetson Nano模块从SODIMM连接器中滑出
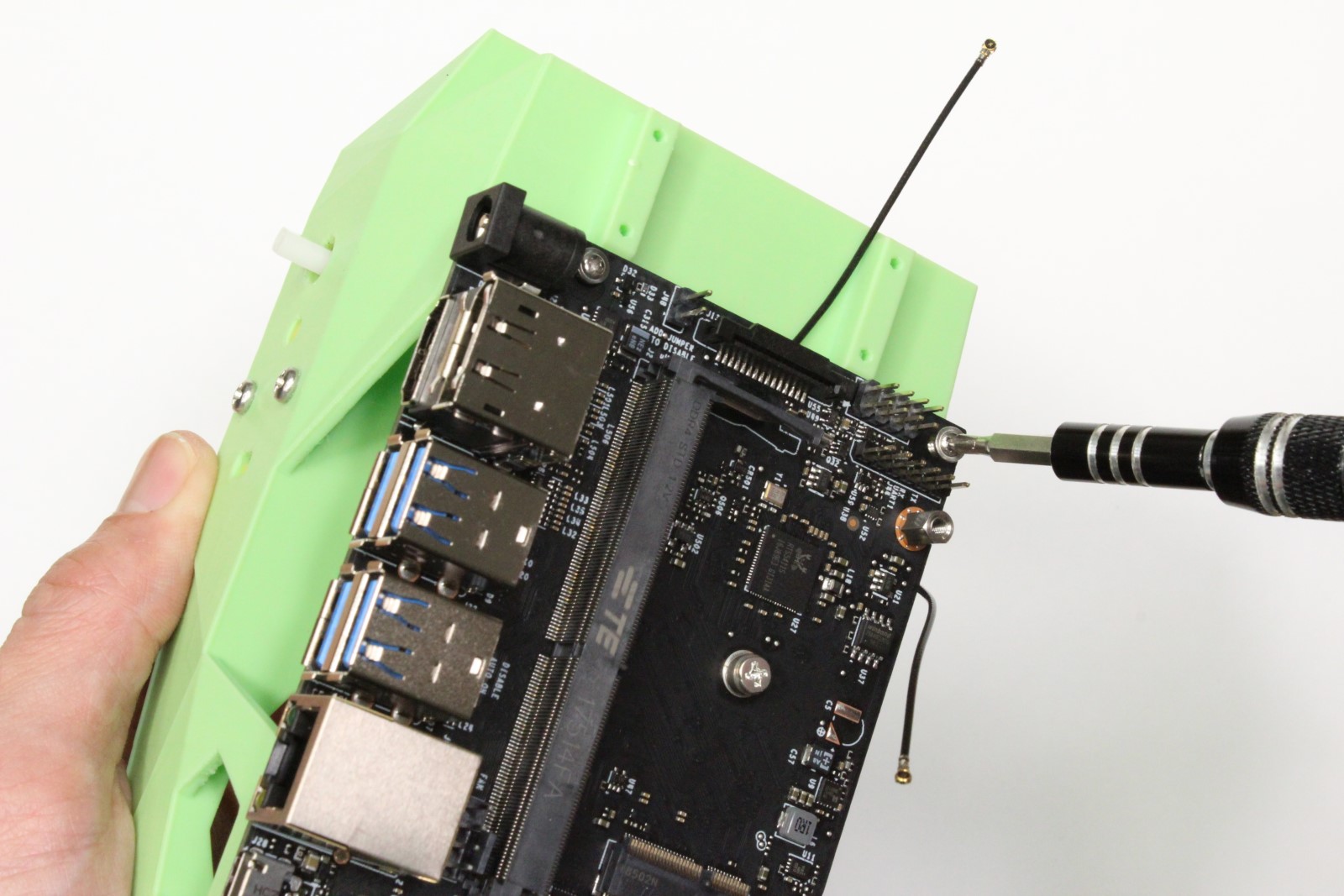
步骤8 - 将WiFi模块连接到开发人员套件



- 使用自攻螺钉将显影套件连接到机箱
- 使用手指将天线按到WiFi模块上
- 通过M.2插槽从开发工具包中取出螺钉
- 将WiFi模块插入开发工具包中的M.2插槽
- 将WiFi模块固定到开发人员套件上并拧下螺钉(3)
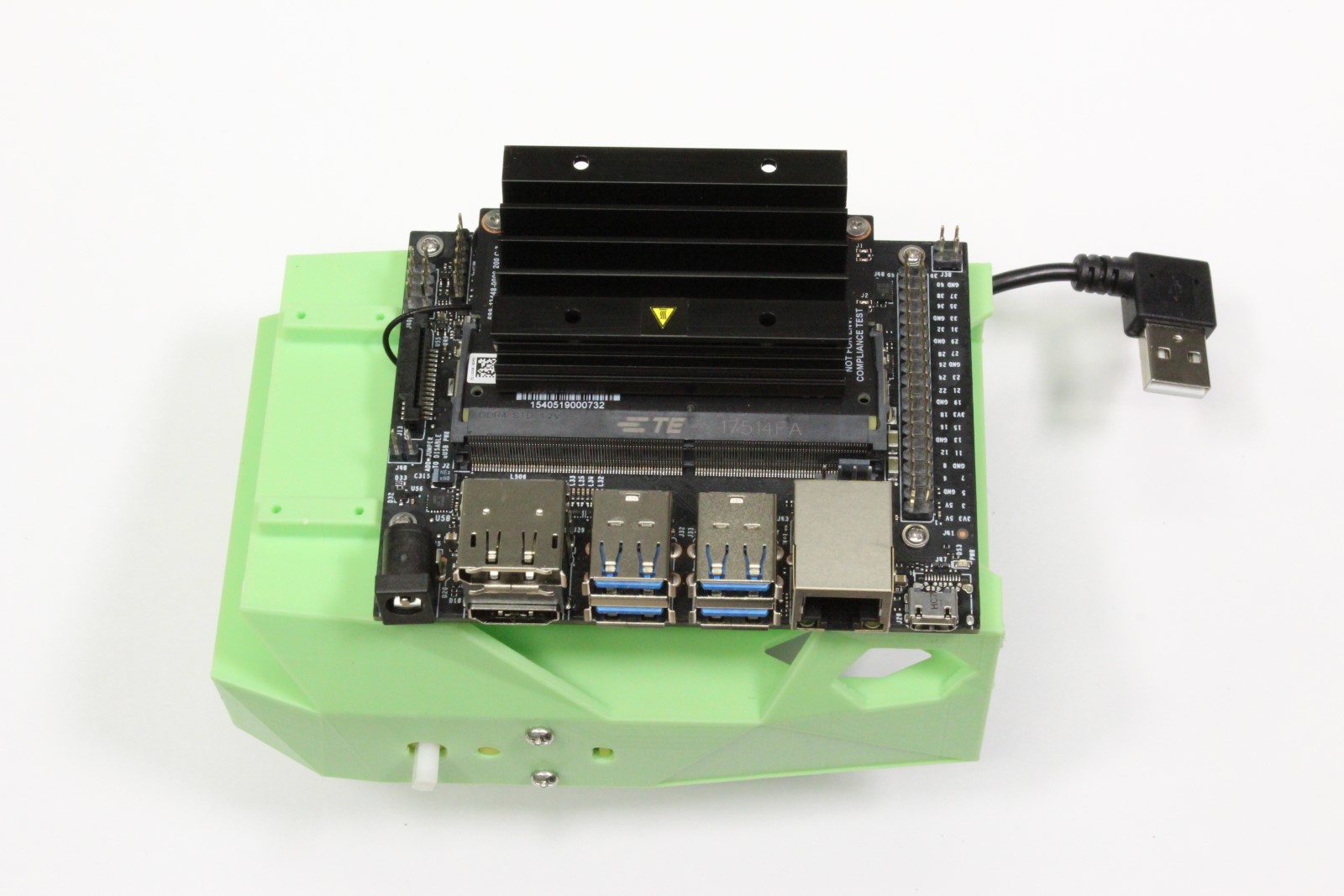
- 将Jetson Nano模块重新连接到开发人员套件
步骤9 - 安装球形脚轮



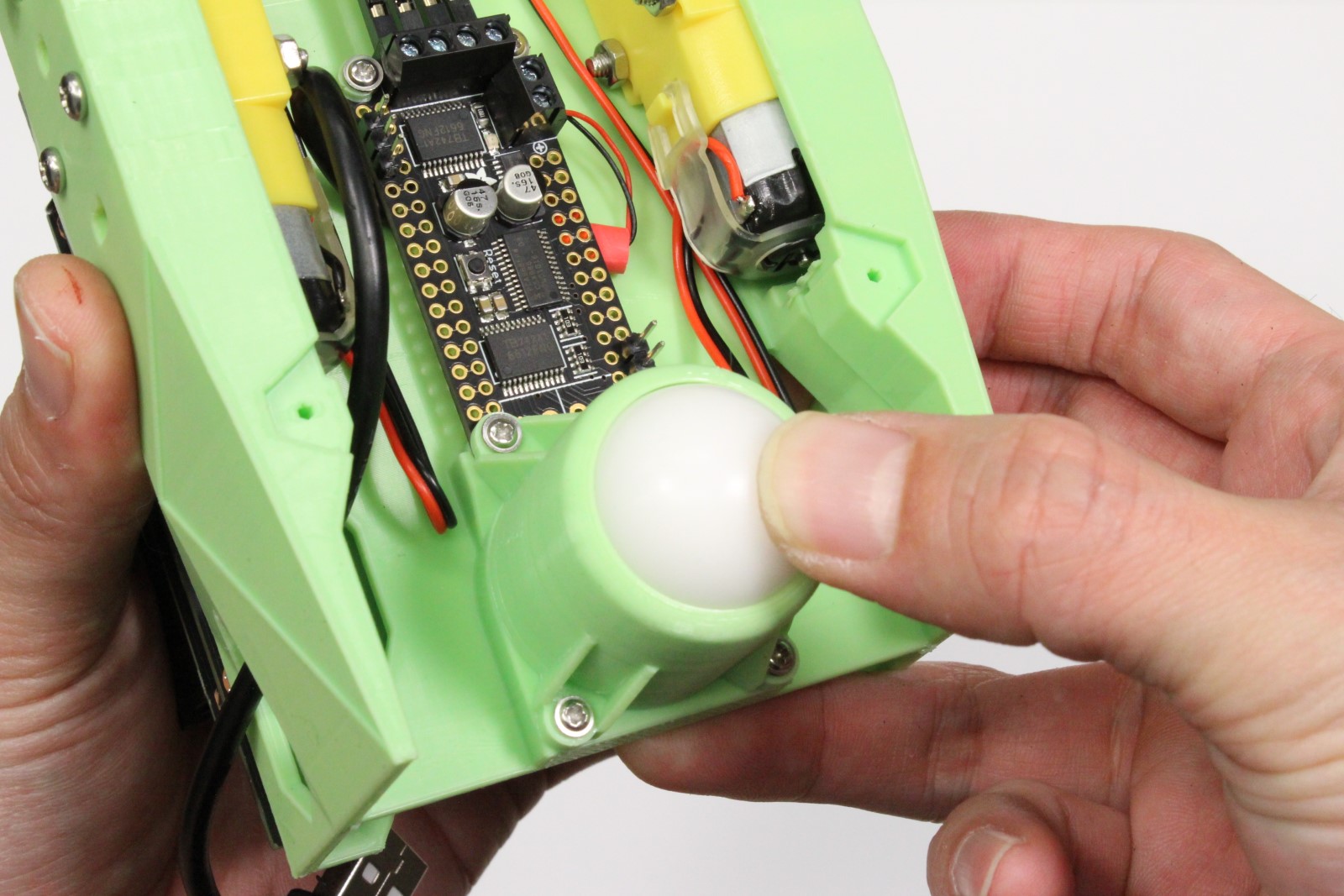
- 将脚轮放在护罩内
- 将脚轮底座插入护罩,固定球
- 如果插座太紧,请将其归档。
- 使用自攻螺钉将装配好的脚轮连接到机箱上
- 它将与电机驱动器共用两个螺孔。
步骤10 - 焊接头到PiOLED显示器上
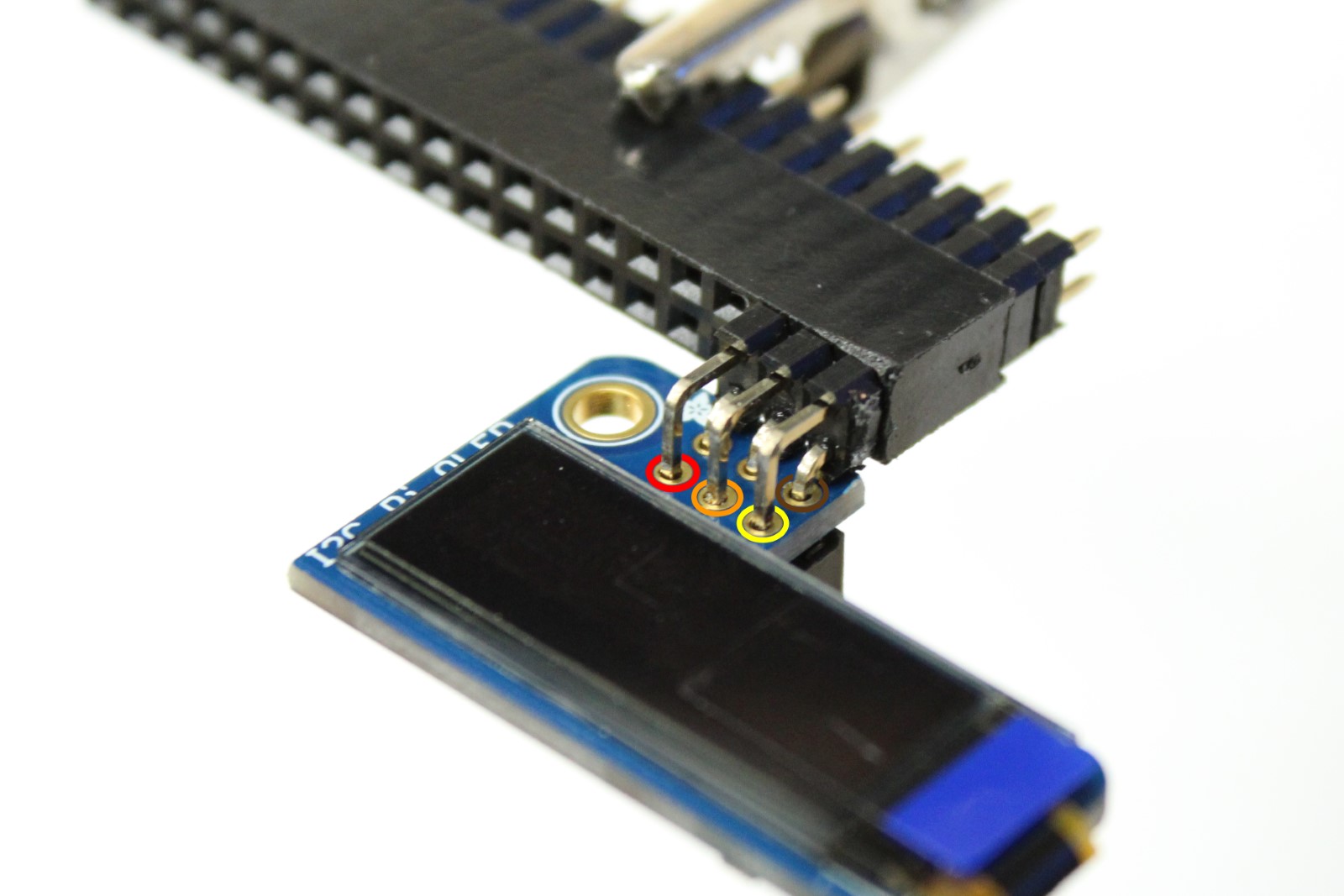
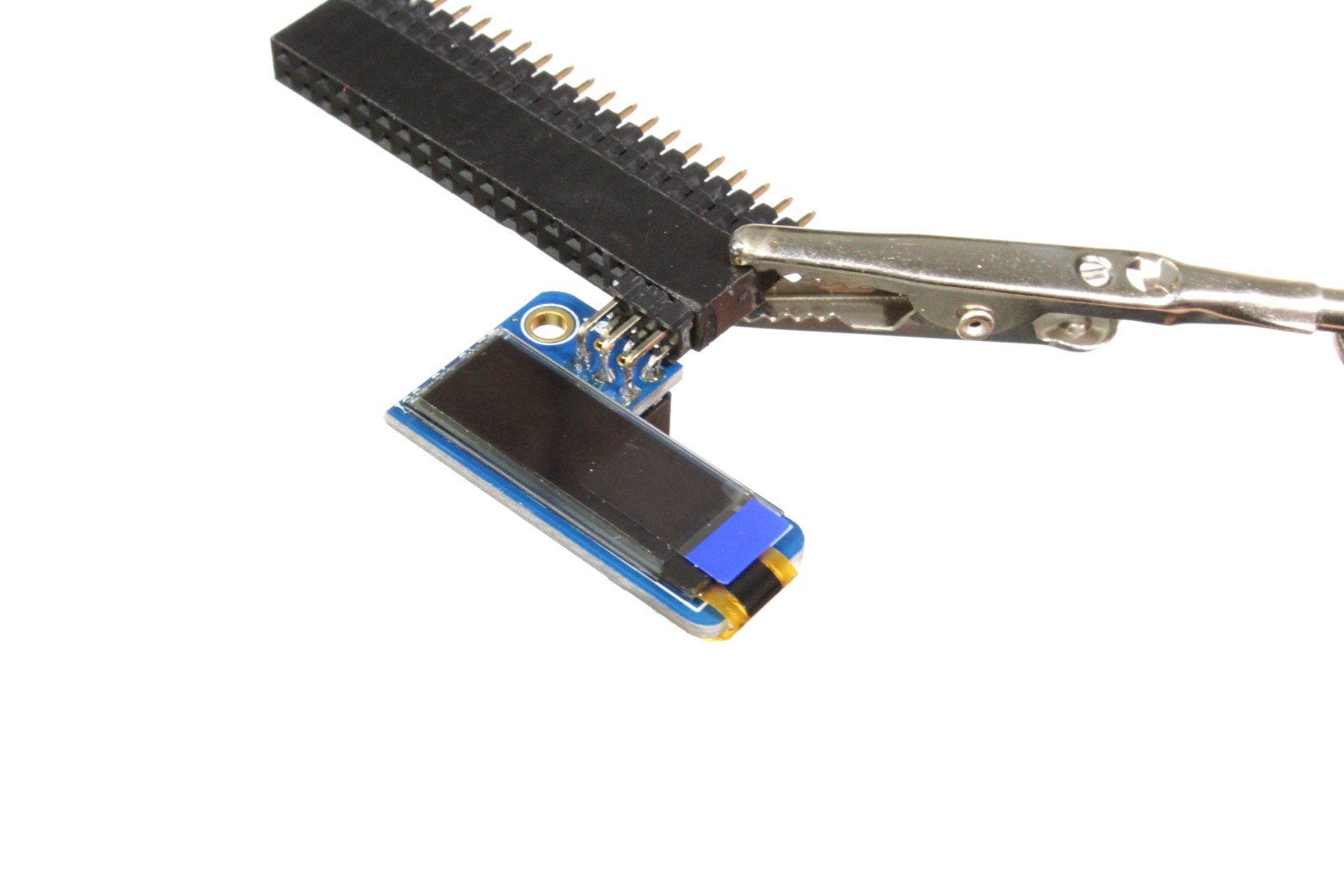
- 通过某种方法将6针直角头连接到PiOLED显示器
- 焊接图示的引脚(放大右图像时看到的3.3V,SDA,SCL和GND焊料)
- 针脚靠近显示屏,小心避免屏幕带有烙铁头。
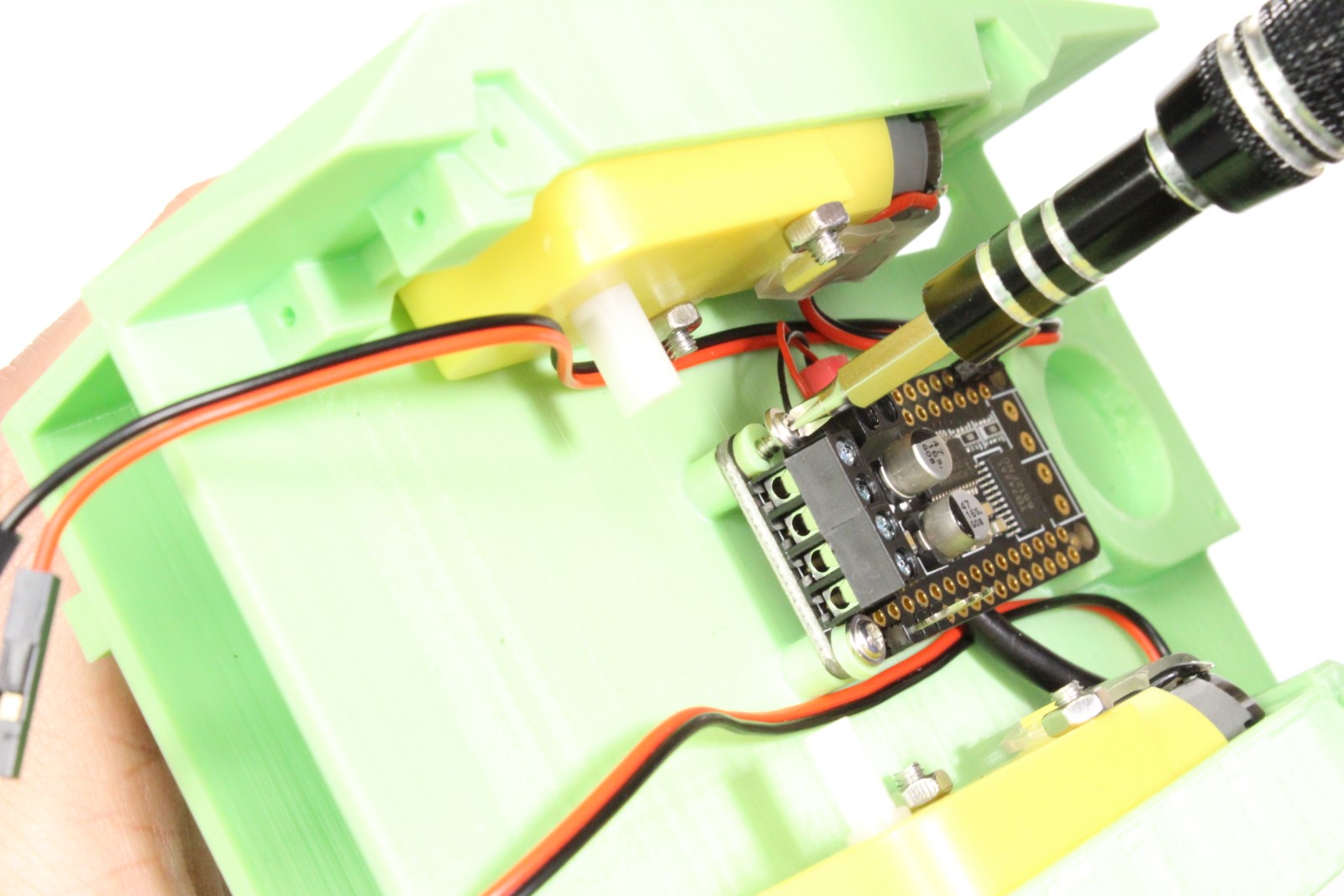
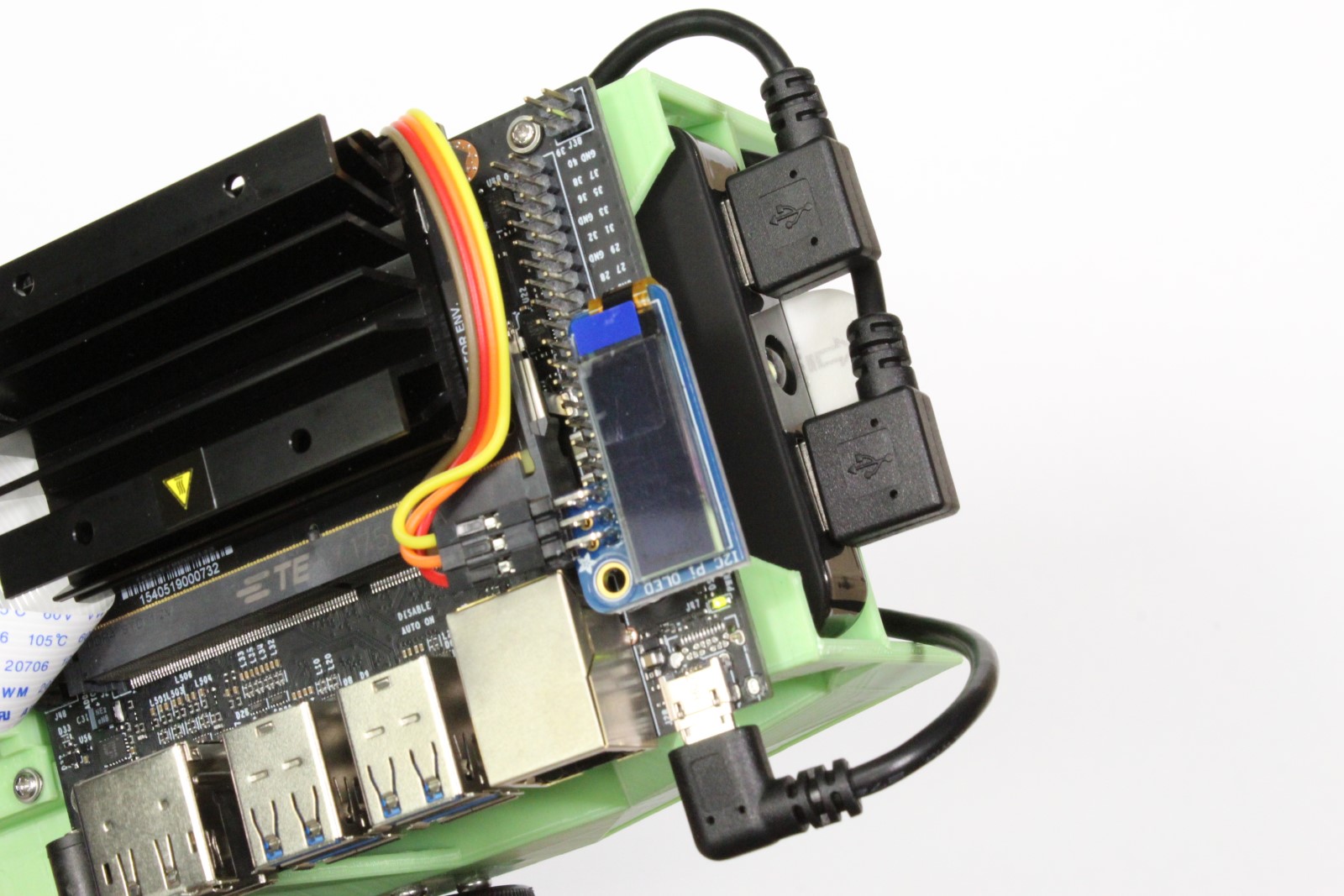
步骤11 - 将电机驱动器连接到PiOLED显示器


- 选择4芯母 - 母跳线电缆。
- 我们使用棕色,红色,橙色,黄色部分。 您可以相应地映射颜色。
- 如图所示,将3.3V(红色),GND(棕色),SDA(橙色)和SCL(黄色)连接到电机驱动器
- 将4线跳线电缆段穿过机箱
- 如图所示,将红色,棕色,橙色和黄色线连接到直角头
- 密切关注! 反转红色/棕色线可能会损坏系统。
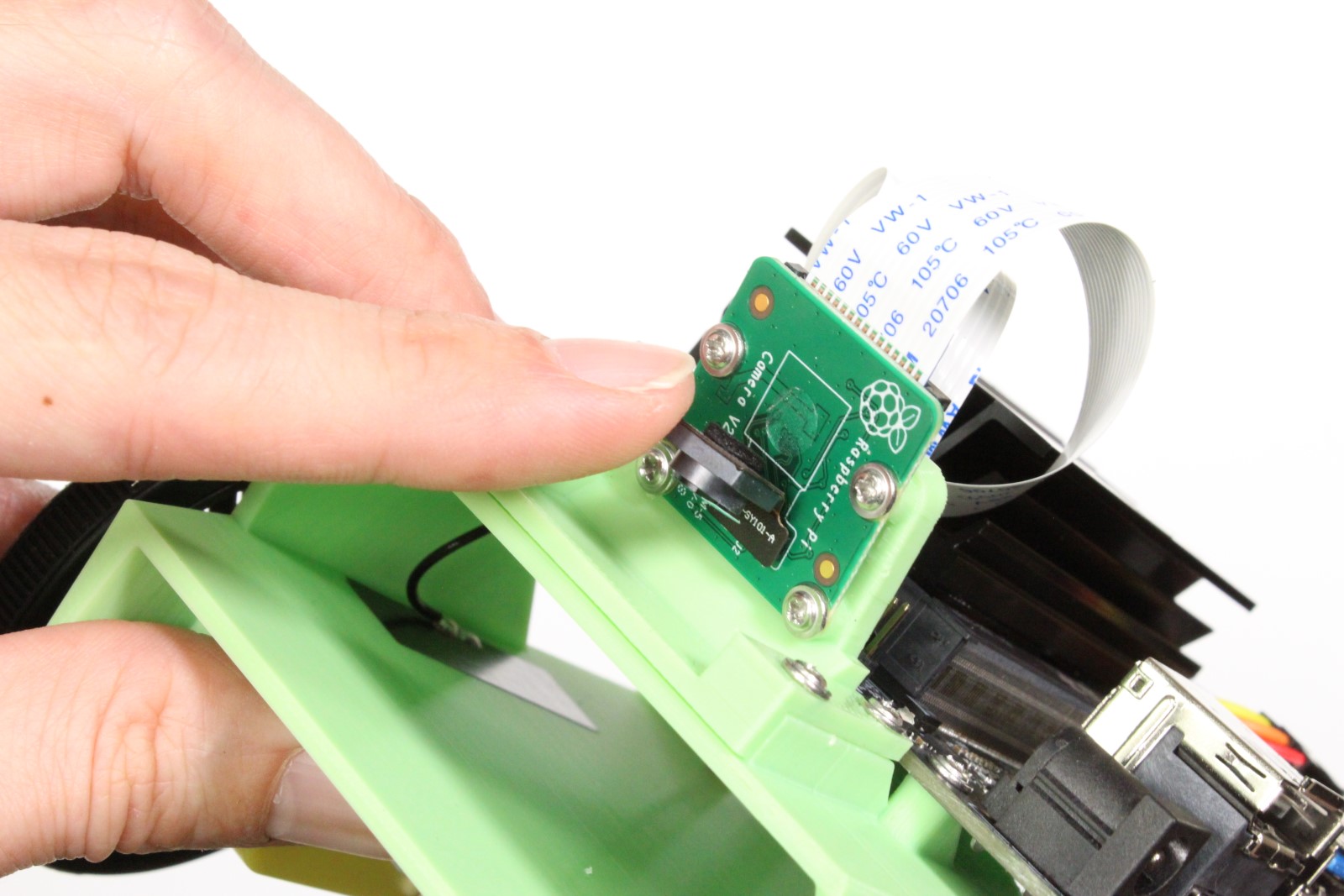
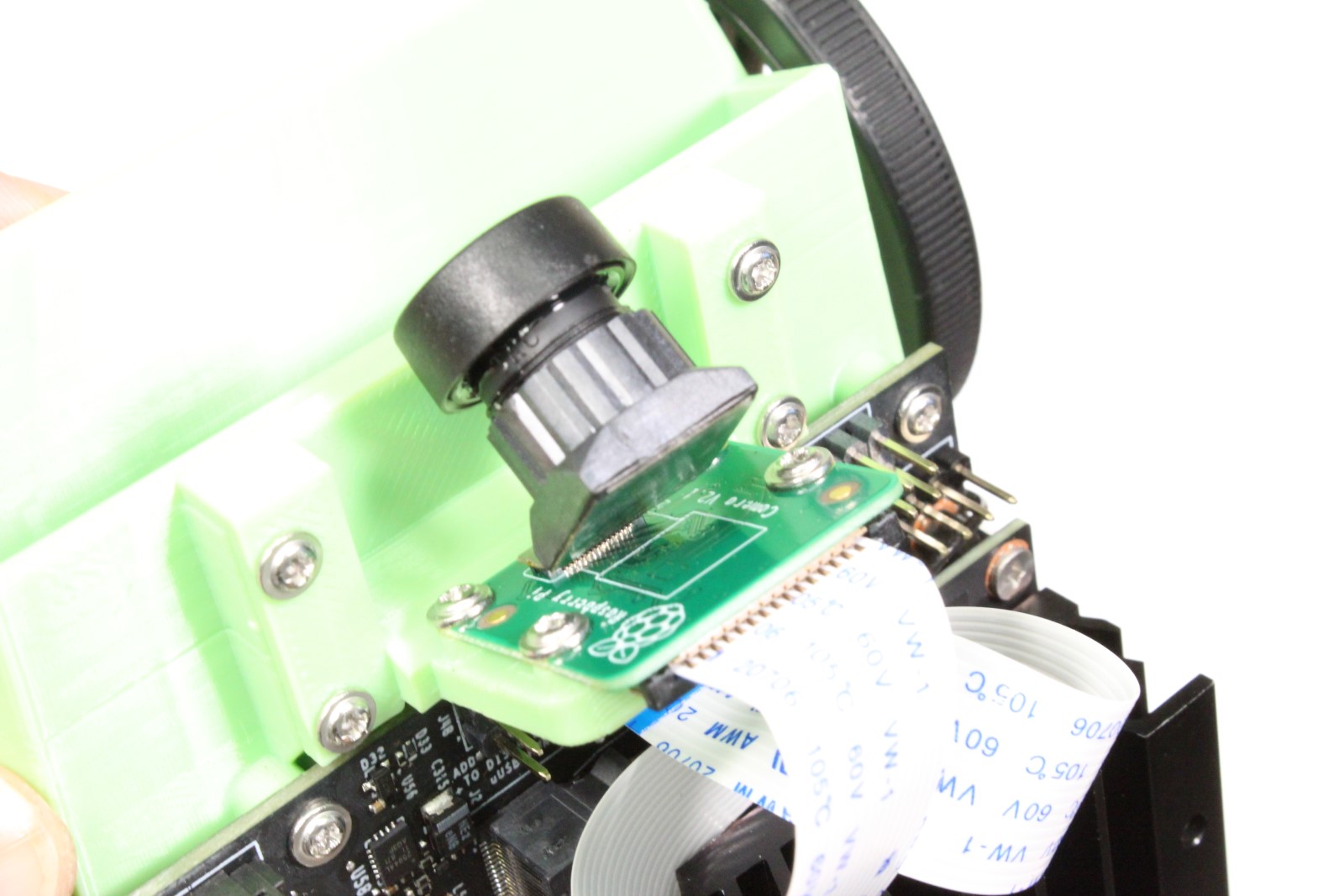
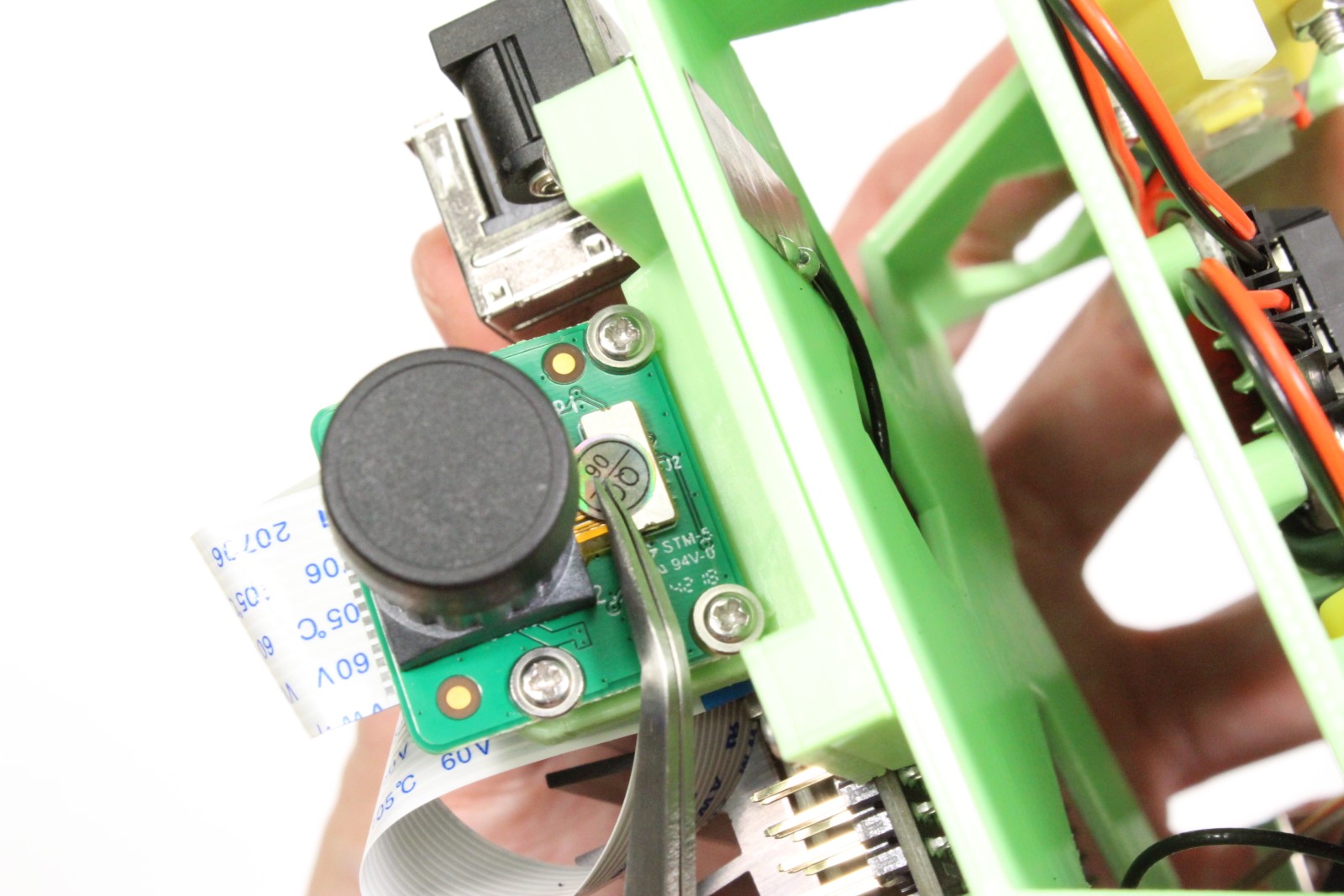
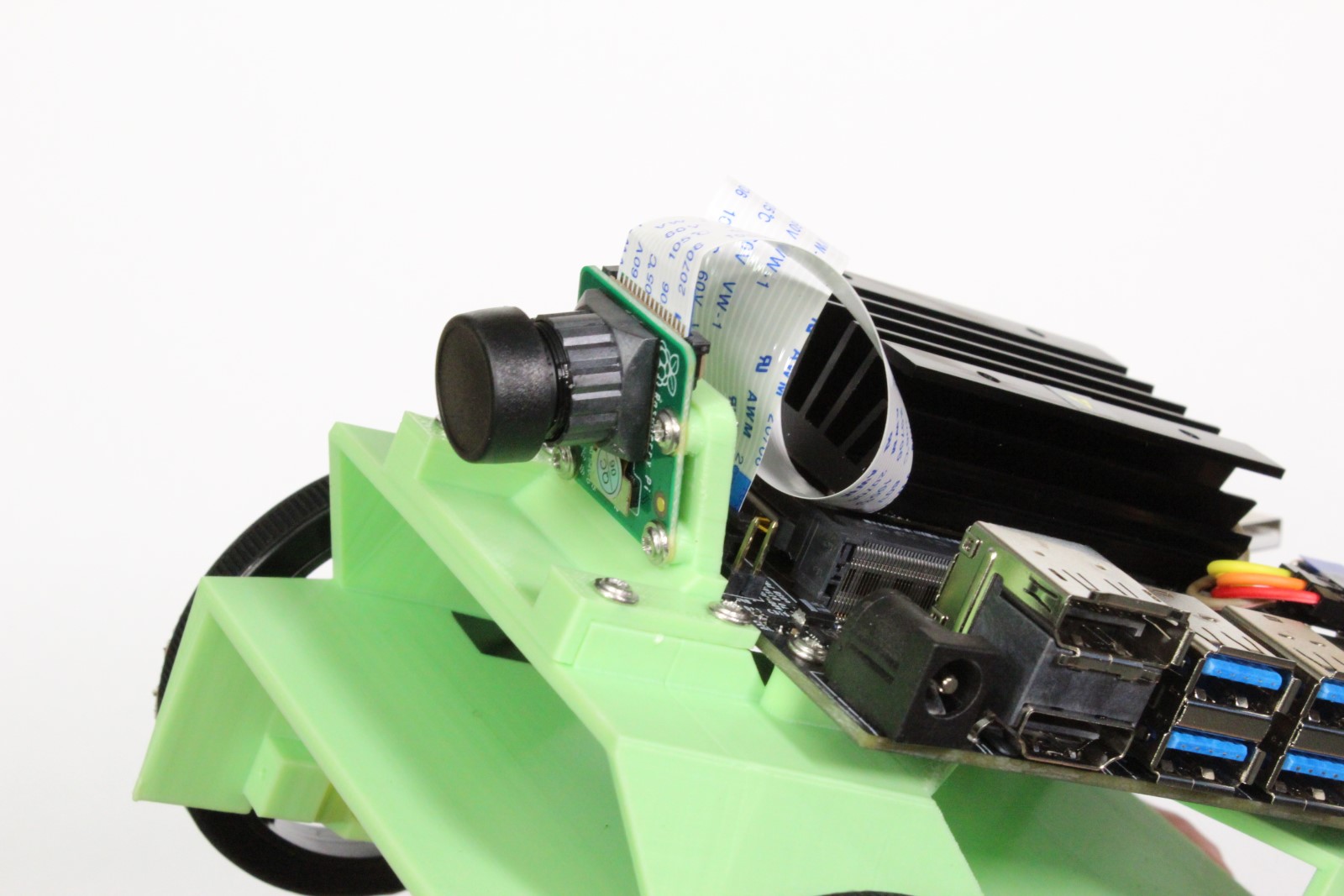
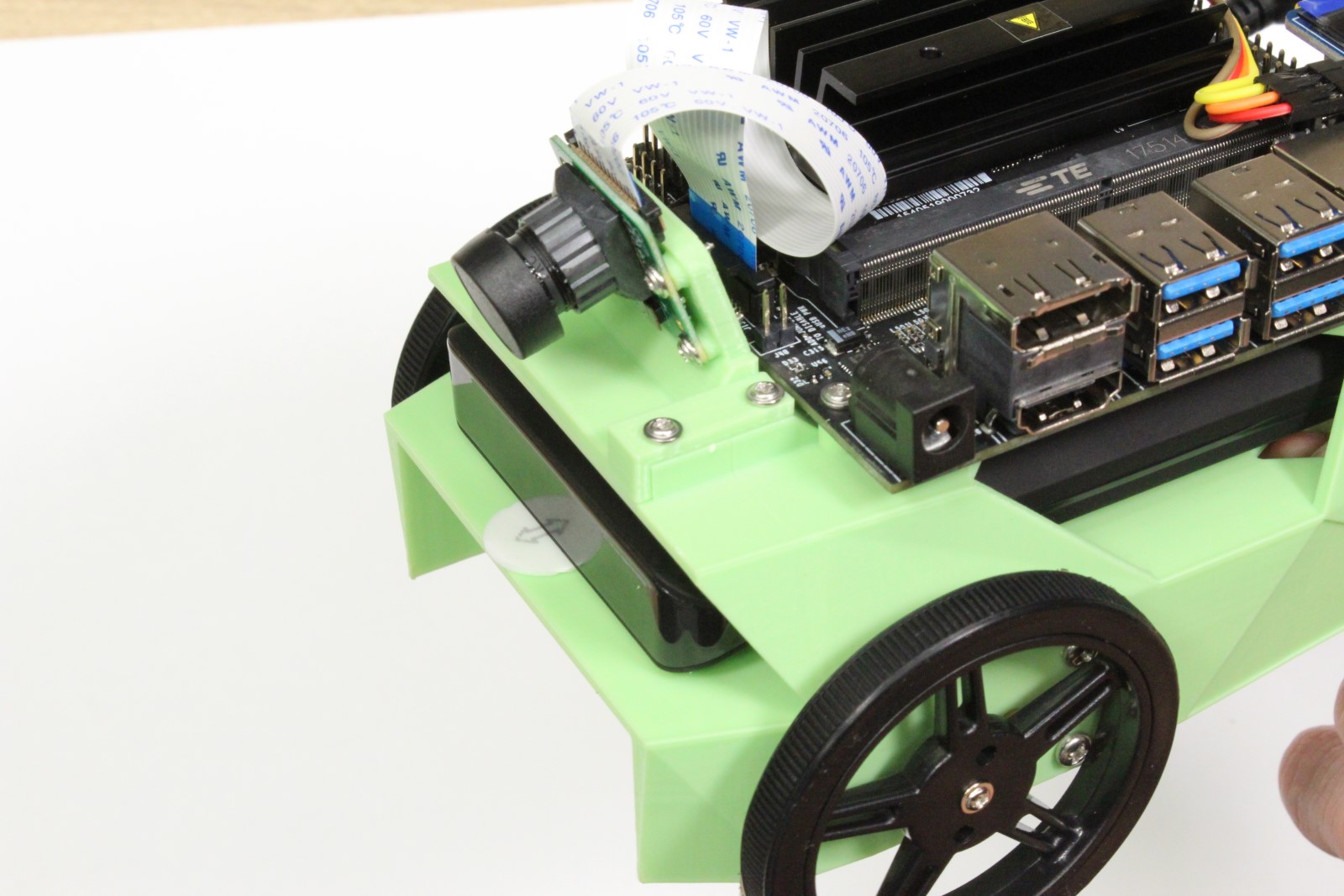
步骤12 - 安装相机
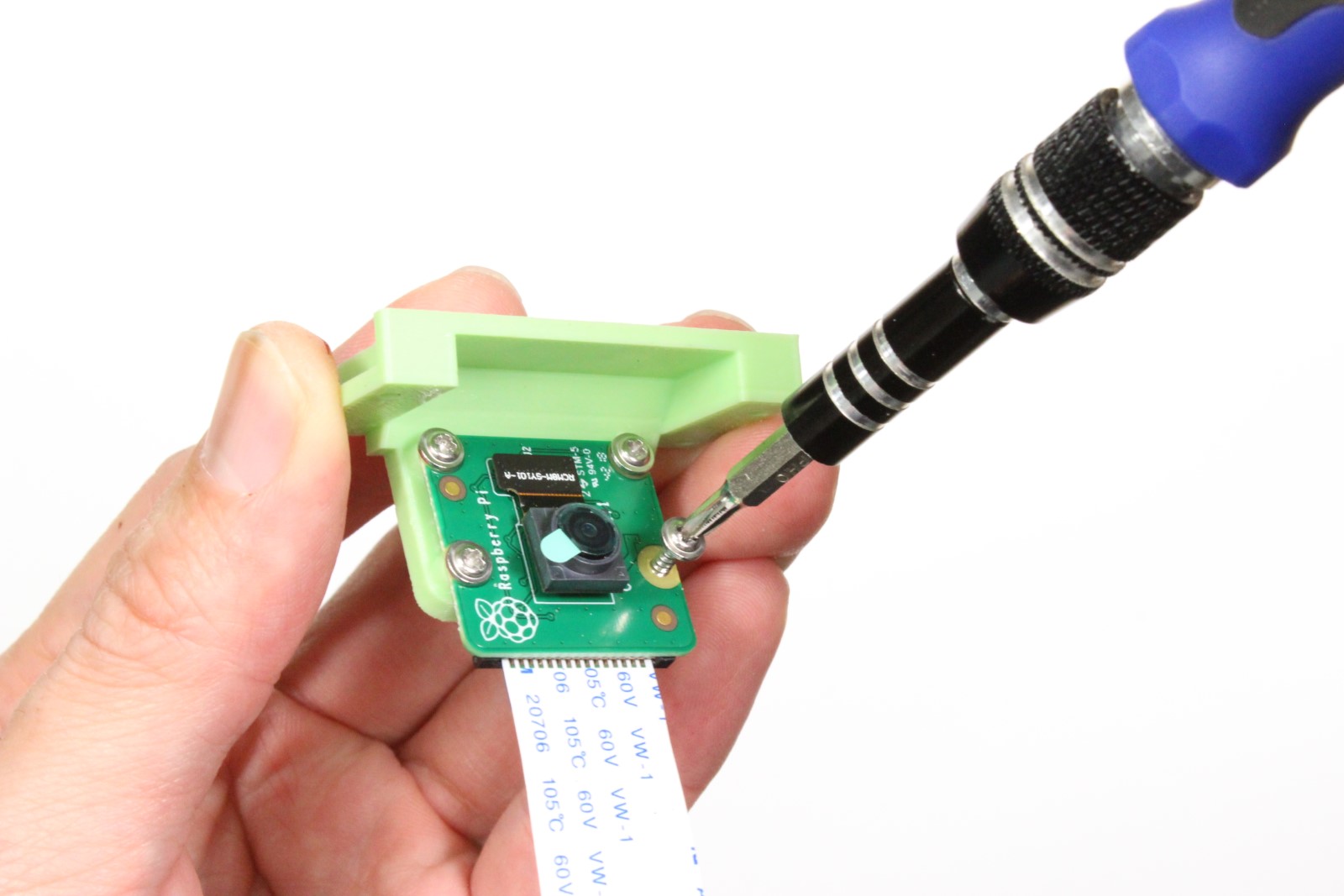
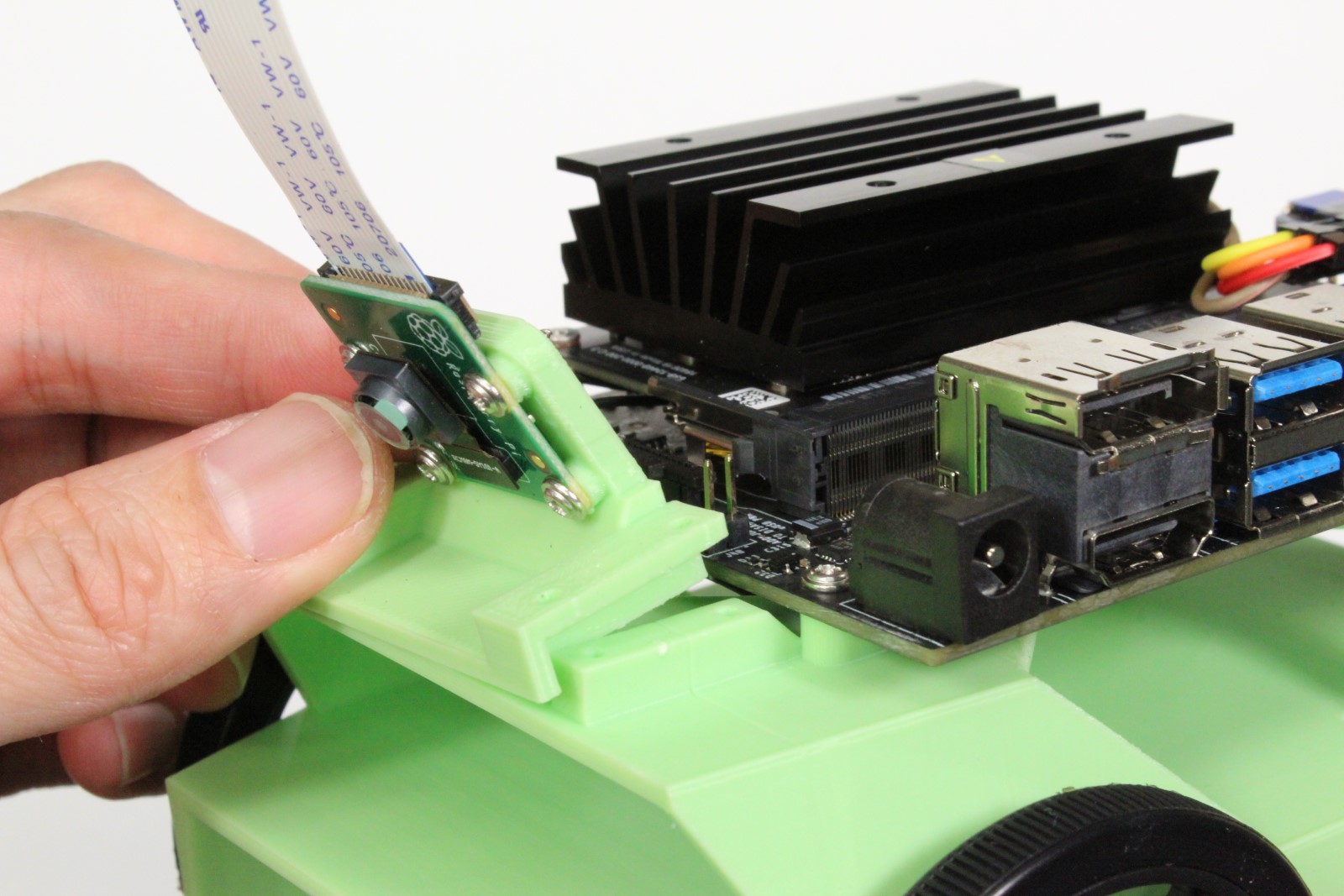
- 使用4个自攻螺钉将相机安装到相机支架上
- 使用4个自攻螺钉将摄像机支架安装到机箱上
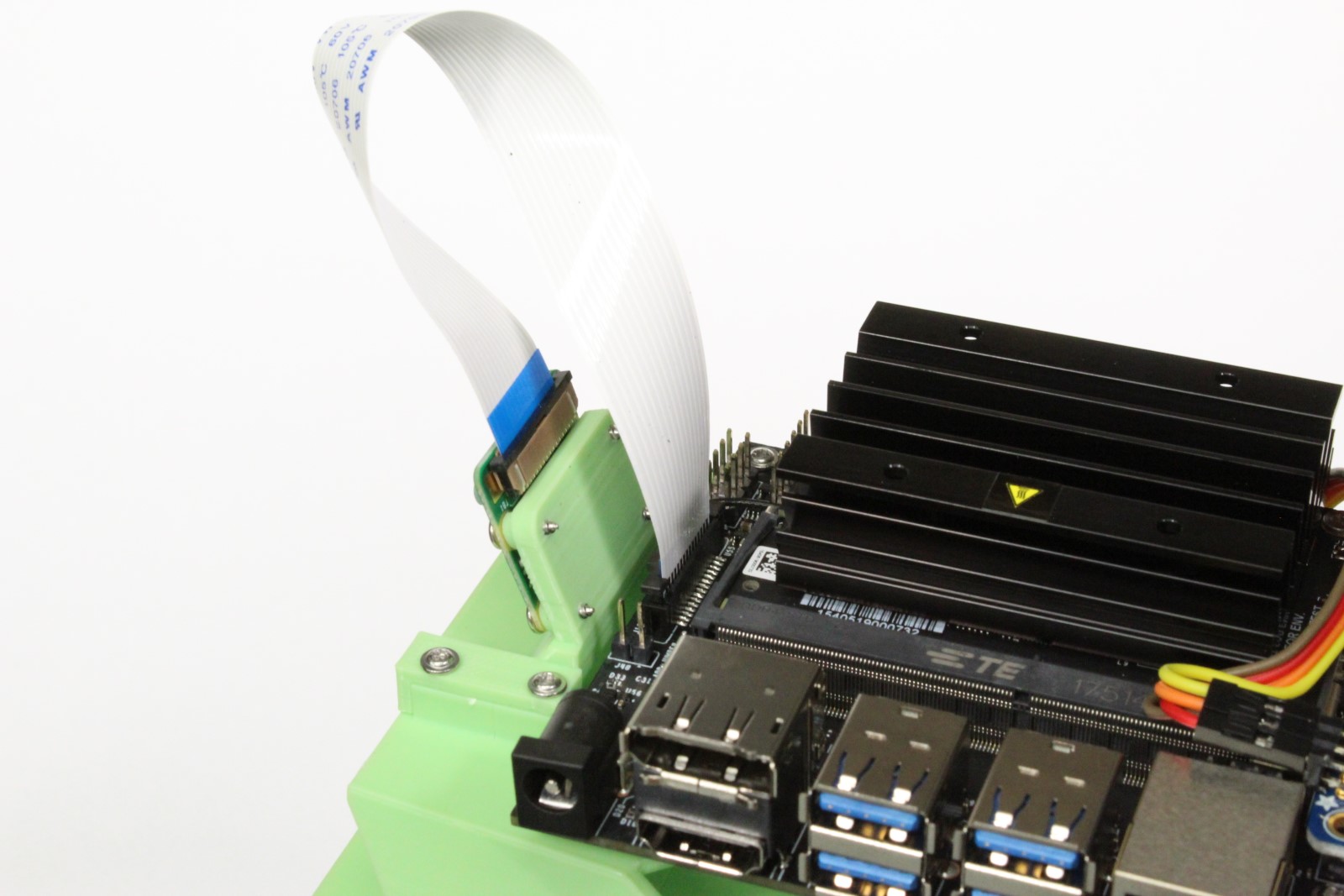
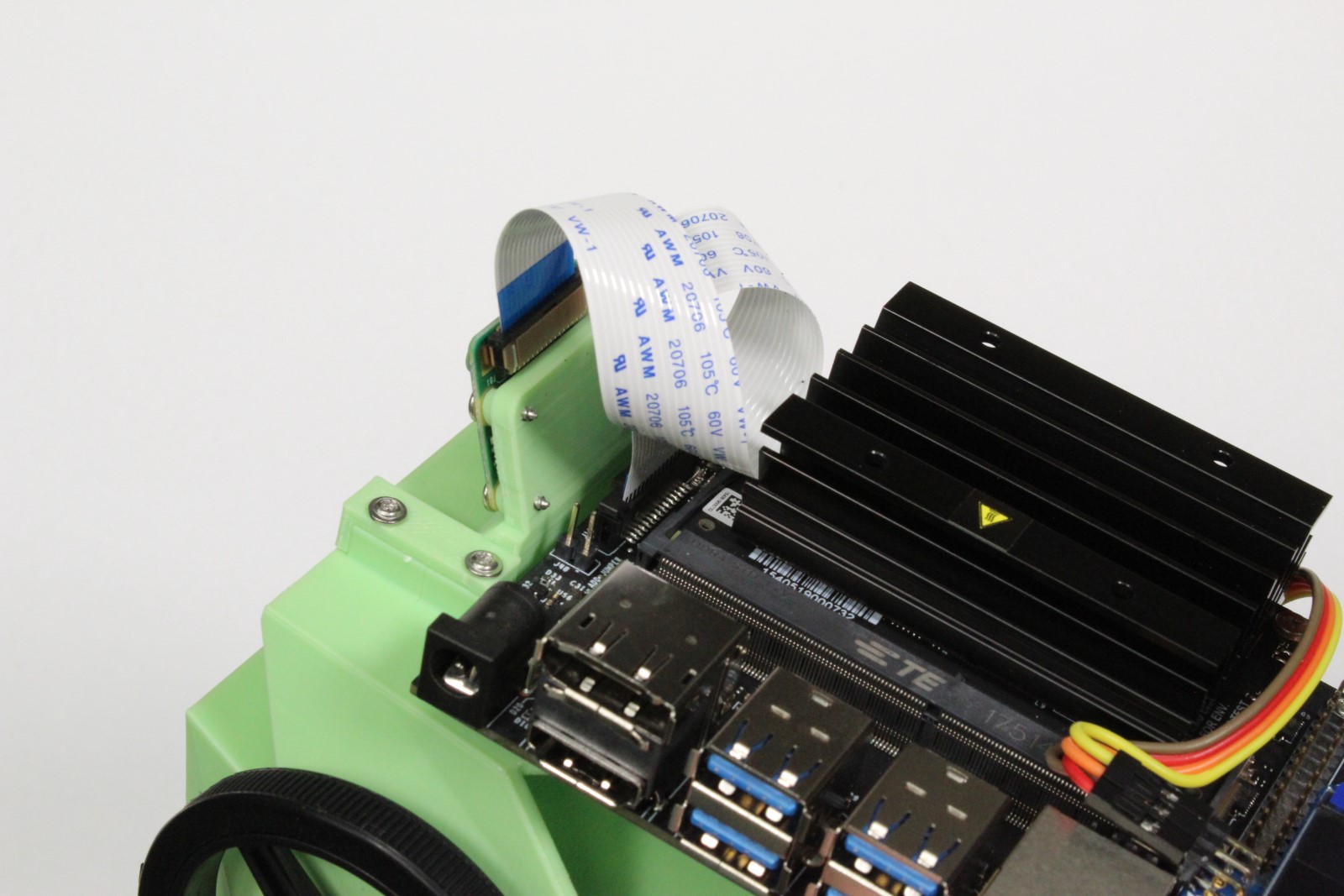
- 将带状电缆的另一端插入Jetson Nano开发套件中
- (可选)将带状电缆塞在散热器上进行整理
步骤13 - 连接广角传感器
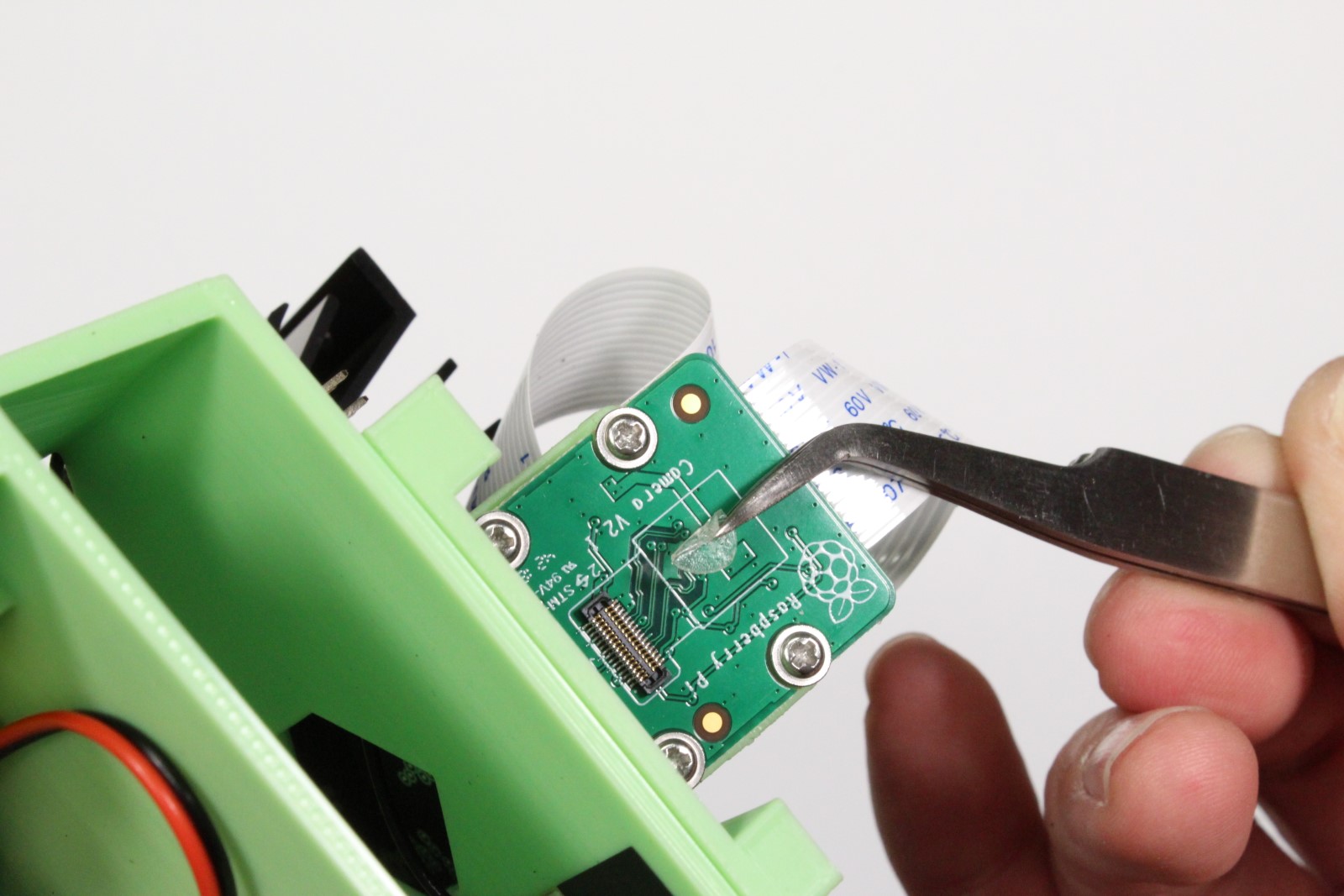
- 剥离原始相机传感器
- 去除多余的粘合剂材料
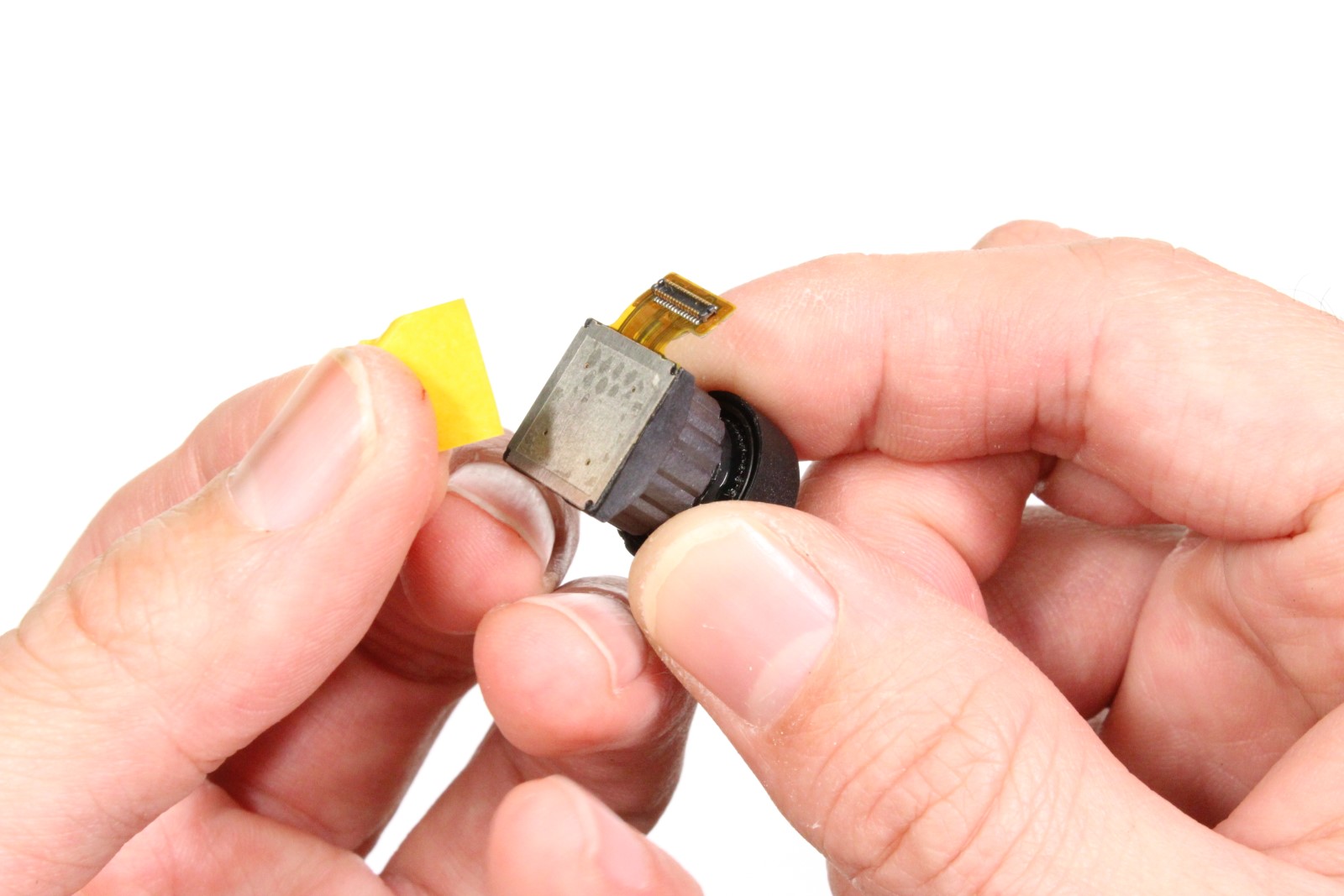
- 从广角更换传感器上取下粘性薄膜盖
- 将广角更换传感器连接到相机模块
- 确保传感器连接器固定在摄像头模块上
步骤14 - 安装电池

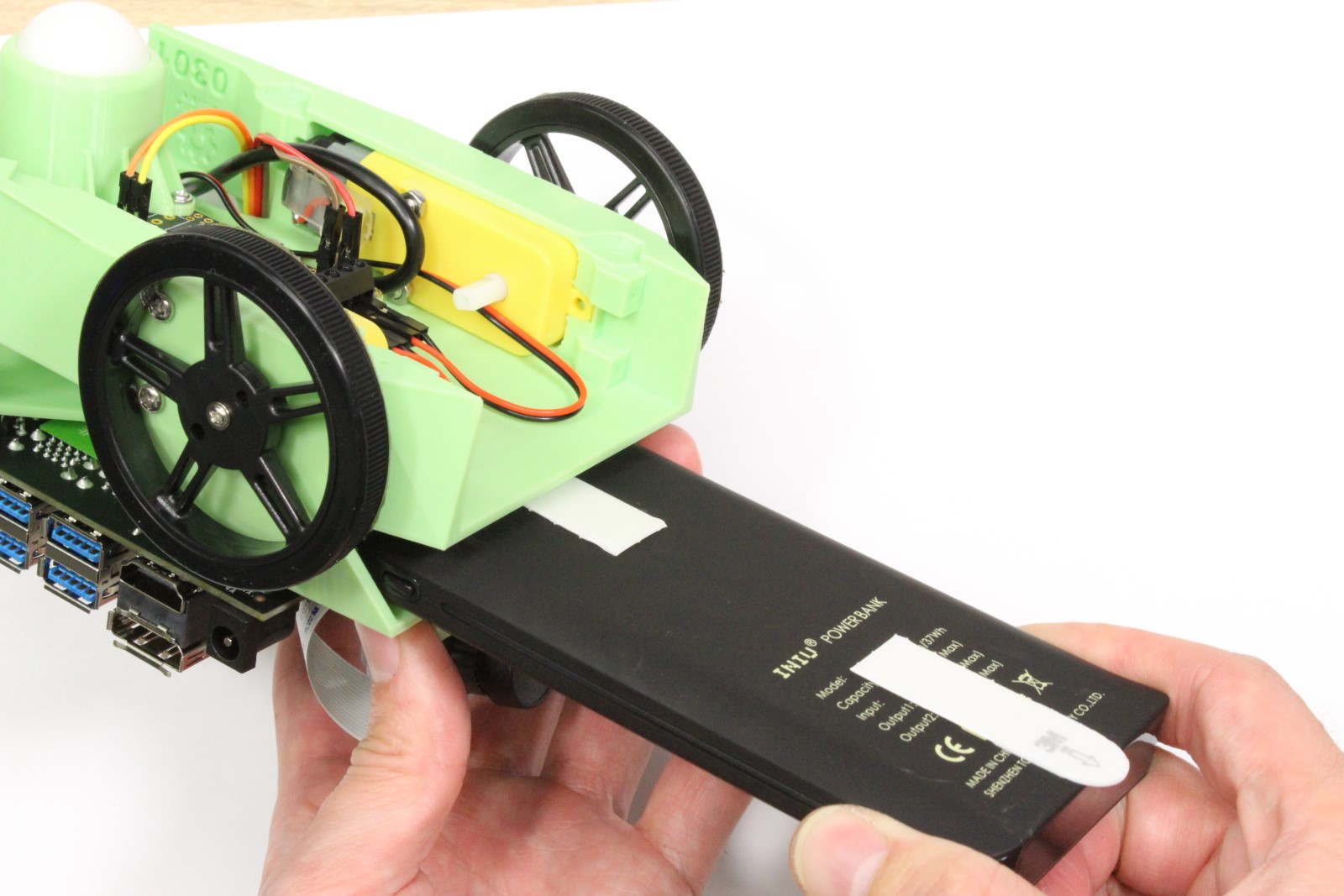

- 将双面粘性标签贴在电池的两端,露出一些标签
- 将机器人倒置,将电池滑入电池槽
- 将电池固定到位,翻转机器人并将电池固定到机箱
步骤14 - 组织电线
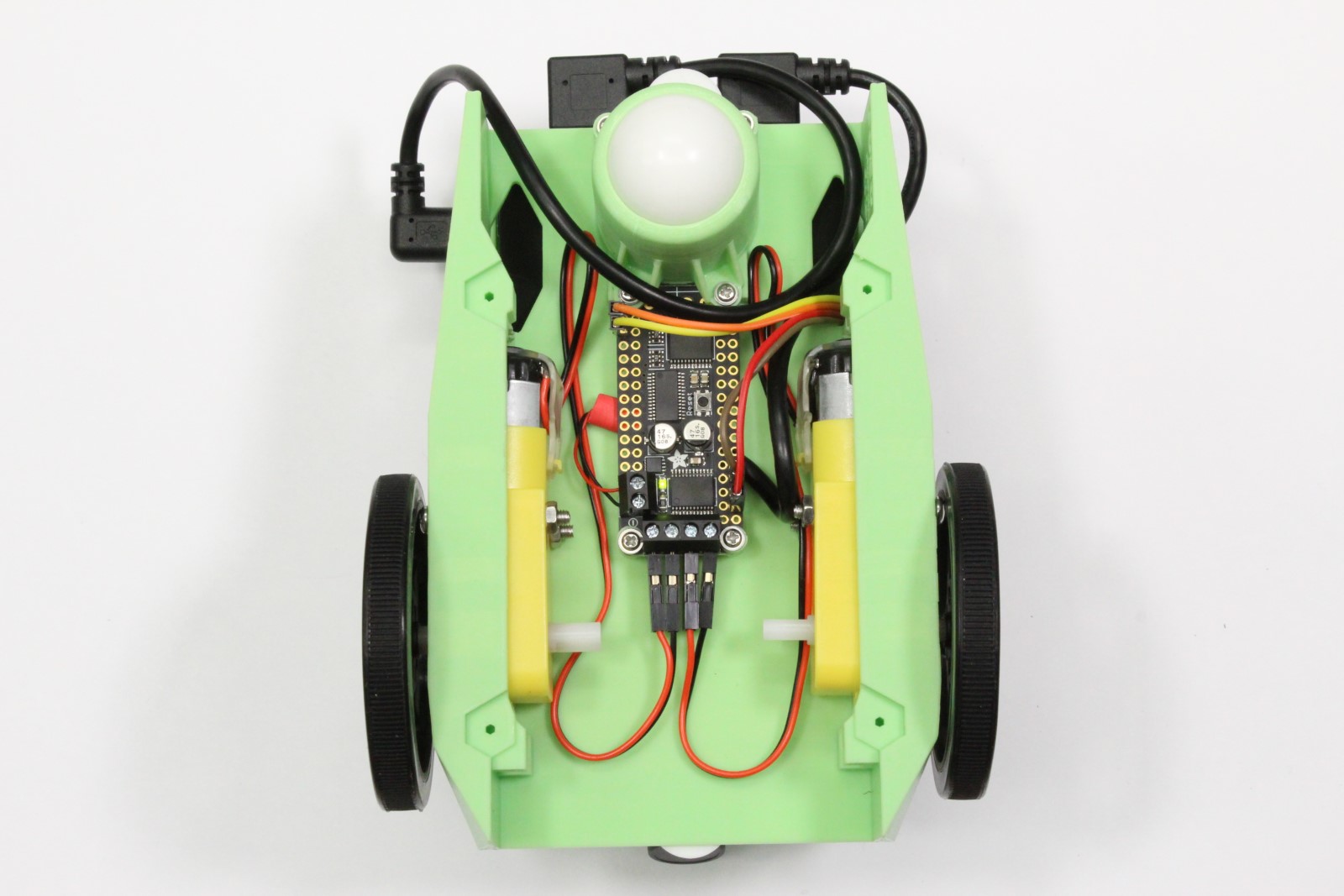
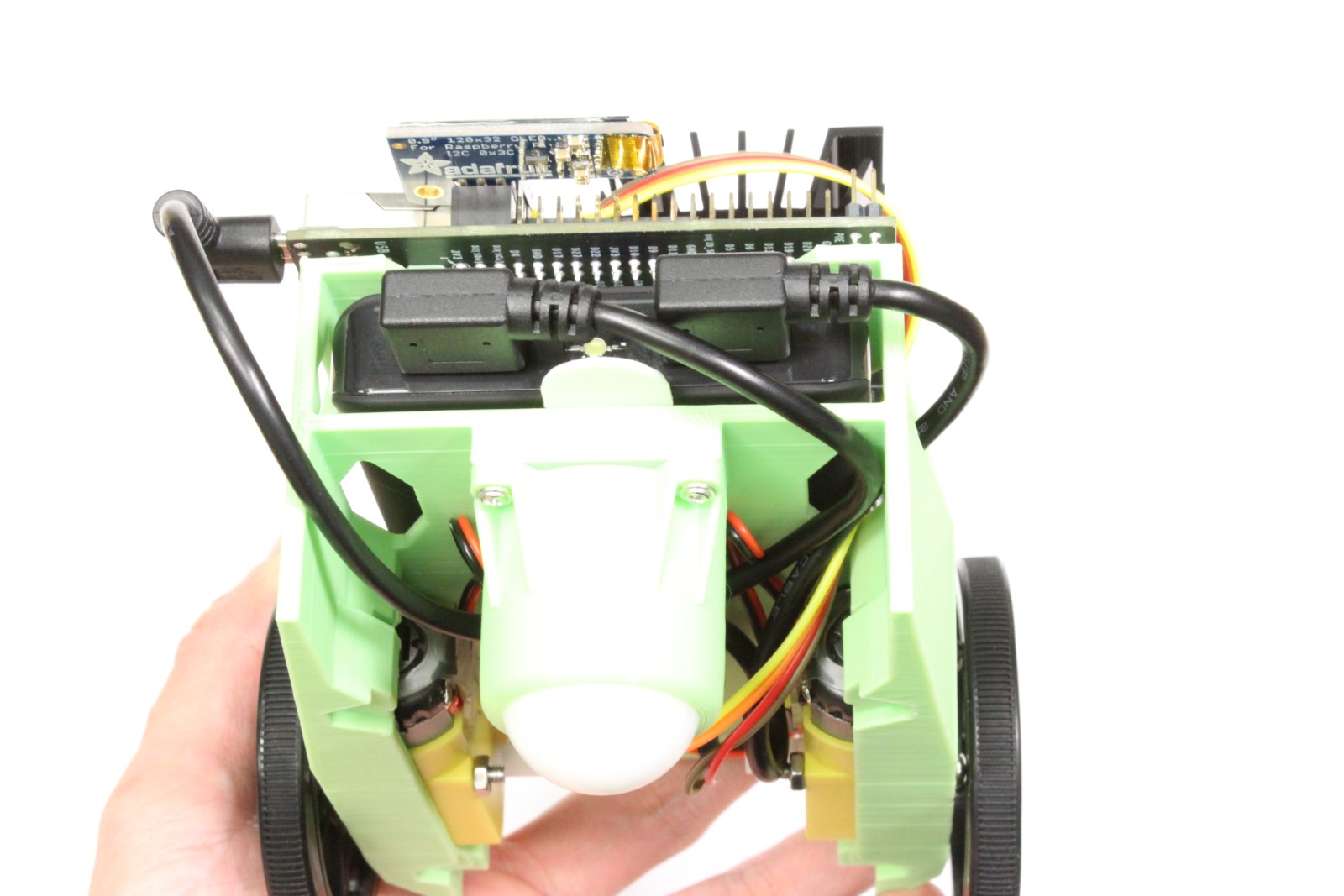
- 将USB电缆穿过机箱以组织和防止拖动
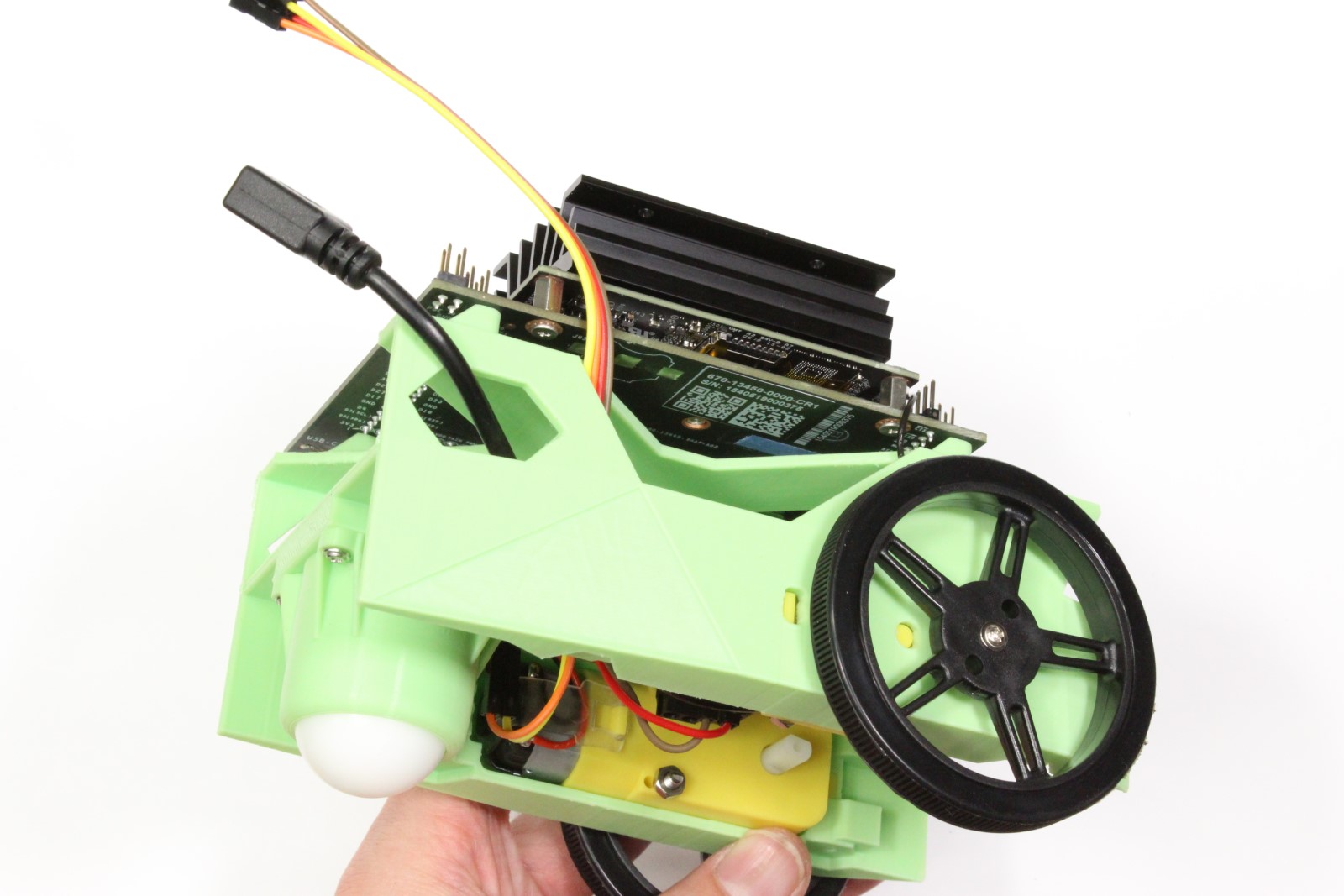
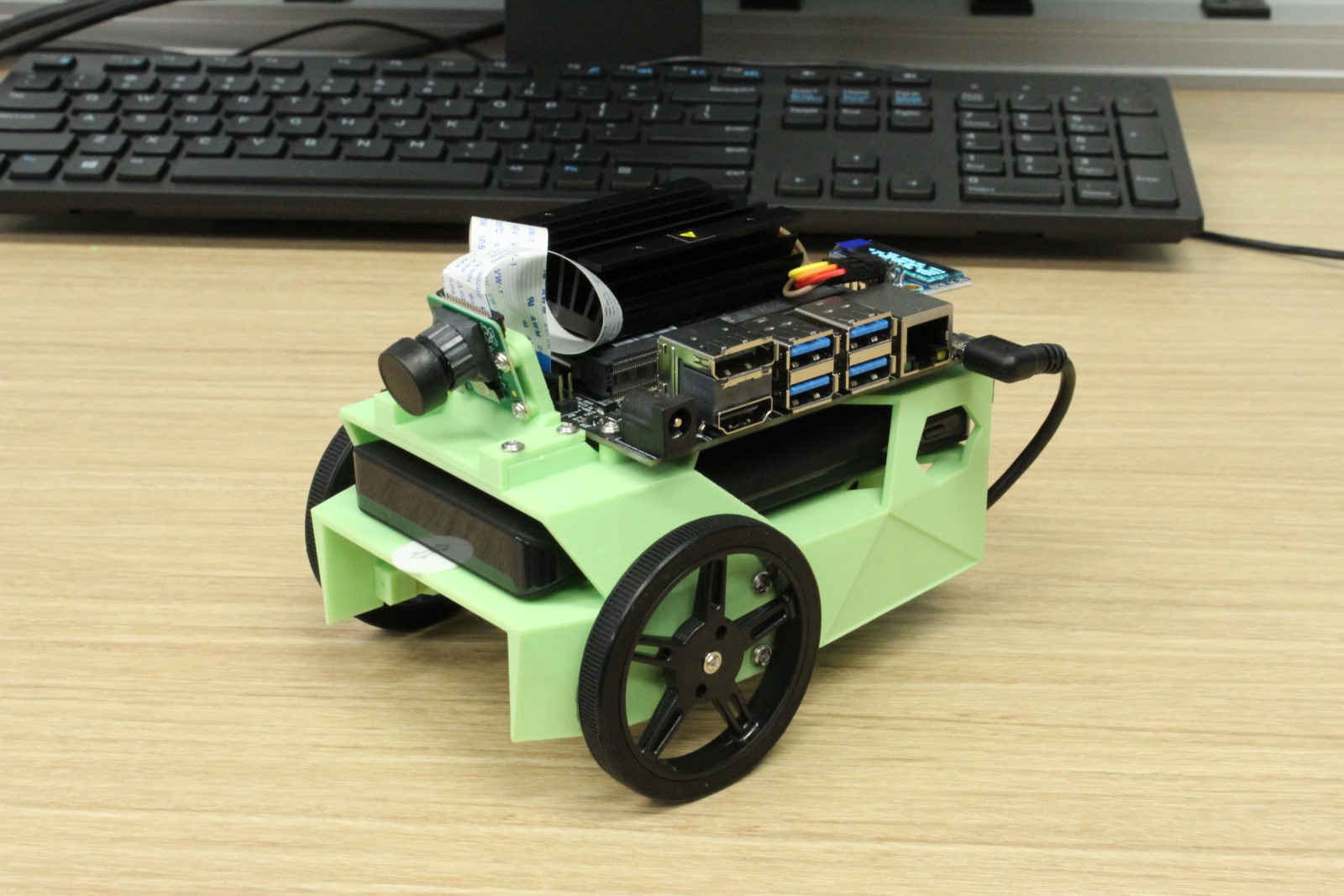
步骤15 - 完成了JetBot
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号