



















Puppy机器狗入门教程-测试-imu测试
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Puppy机器狗入门教程-测试-imu测试
说明
- 本教程介绍如何在puppy上测试imu
相关设备
- puppy机器狗套件:采购地址
操作步骤
- [Remote PC] 启动roscore
$ roscore- [Puppy] 启动imu
$ roslaunch puppy_bringup imu.launch- [Remote PC] 启动Rviz
$ roslaunch puppy_rviz imu_rviz.launch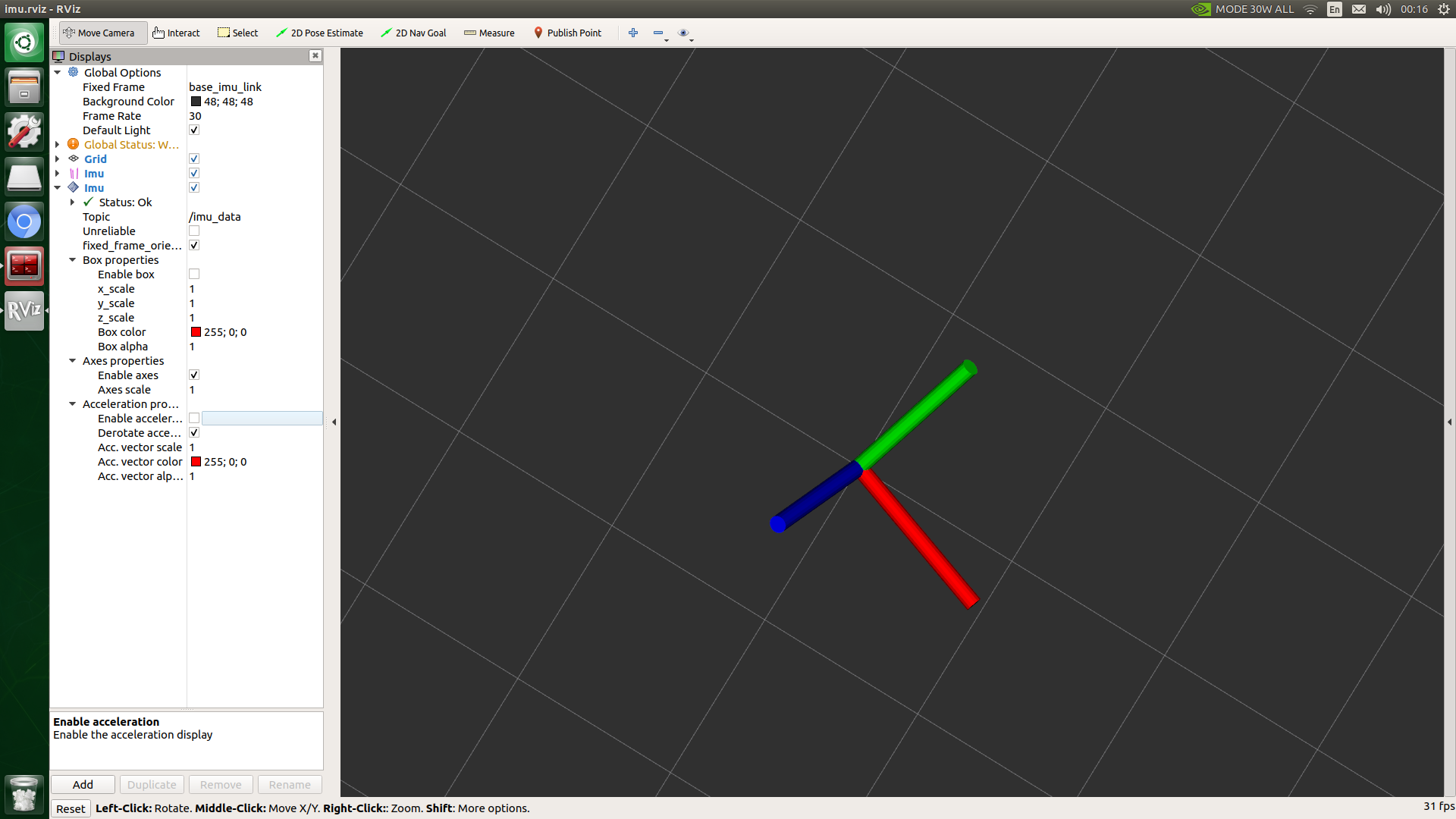
- [Remote PC] 查看imu数据
$ rostopic echo /imu_data- 数据如下:
---
header:
seq: 328
stamp:
secs: 1551260780
nsecs: 234694957
frame_id: base_imu_link
orientation:
x: 0.00419112380065
y: -0.0011557932593
z: -0.435622802123
w: 0.900118810432
orientation_covariance: [0.0025, 0.0, 0.0, 0.0, 0.0025, 0.0, 0.0, 0.0, 0.0025]
angular_velocity:
x: -0.0
y: -0.0
z: -0.0
angular_velocity_covariance: [0.02, 0.0, 0.0, 0.0, 0.02, 0.0, 0.0, 0.0, 0.02]
linear_acceleration:
x: -0.004979609375
y: 0.05286046875
z: 9.95423914062
linear_acceleration_covariance: [0.04, 0.0, 0.0, 0.0, 0.04, 0.0, 0.0, 0.0, 0.04]纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号