



















ROS与传感器教程-整合TM431 imu传感器
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
-
介绍如何在windows下使用TM431 imu传感器
-
介绍如何在ros下使用TM431 imu传感器
步骤:
在windows下使用TM31 imu传感器
-
解压文件包
-
运行ImuAssistant_Setup_Win32_V3-9-13_Signed.exe,安装IMU Assistant
-
运行IMU Assistant
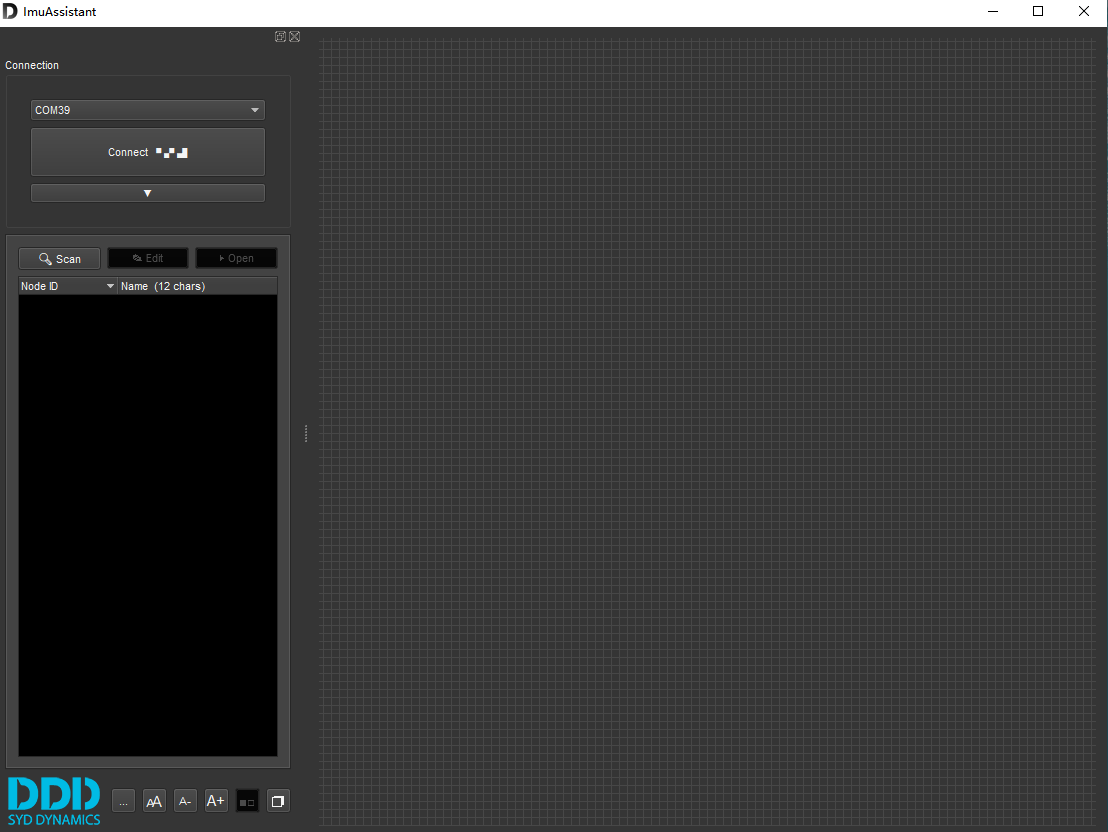
-
选择对应的设备端口
-
点击连接Connect,Baudrate选择115200
-
点击Scan扫描
-
双击设备

在ros1下使用TM31 imu传感器
- 安装TM431 imu传感器驱动
mkdir -p ~/ros1_commons_ws/src
cd ~/ros1_commons_ws/src
cp -r ~/TransducerM_pkg .
cd ~/ros1_commons_ws- 修改设备对应端口号:/dev/ttyACM0
#include "ros/ros.h"
#include "TMSerial.h"
// TransducerM Interface:
EasyObjectDictionary eOD;
EasyProfile eP(&eOD);
//Define the serial port here:
#define DEVICE_PORT "/dev/ttyACM0"- 编译
catkin_make- 启动roscore
roscore- 运行
rosrun TransducerM_pkg TMSerial
Serial port opened successfully !- 查看话题
rostopic list
/TransducerM
/rosout
/rosout_agg- 查看TM431 imu数据
rostopic echo /TransducerM
header:
seq: 1913
stamp:
secs: 0
nsecs: 0
frame_id: ''
orientation:
x: 0.6375913023948669
y: -0.2870144844055176
z: 0.6067237257957458
w: 0.3781353533267975
orientation_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
angular_velocity:
x: 0.0
y: 0.0
z: 0.0
angular_velocity_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
linear_acceleration:
x: 0.0
y: 0.0
z: 0.0
linear_acceleration_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
roll: 43.13677215576172
pitch: -82.20235443115234
yaw: 260.60906982421875纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号