



















ROS与传感器教程-Windows下使用kinect v2
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍如何在Windows下使用kinect v2
- 点击采购对应产品
操作步骤
-
安装Kinect for Windows SDK 2.0,点击下载
-
默认安装路径:C:\Program Files\Microsoft SDKs\Kinect
-
运行该路径下的程序:C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\Tools\SDKBrowser

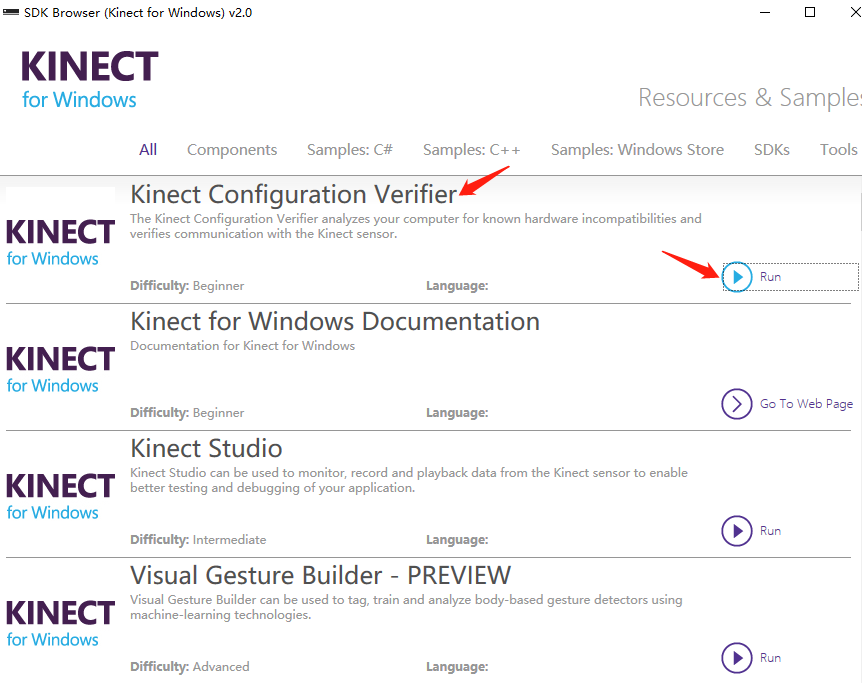
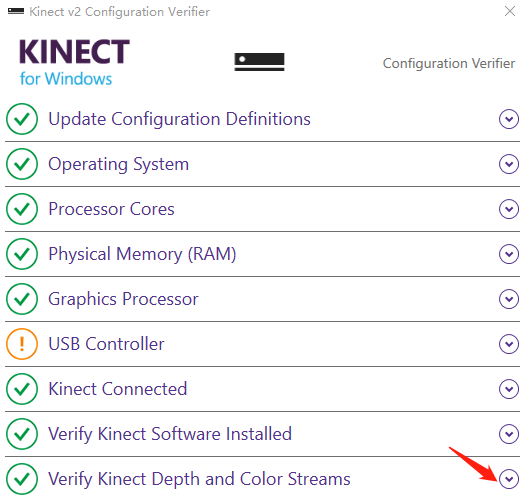
- 检查是否连接成功 打开SDK Browser v2.0,找到kinect自检程序
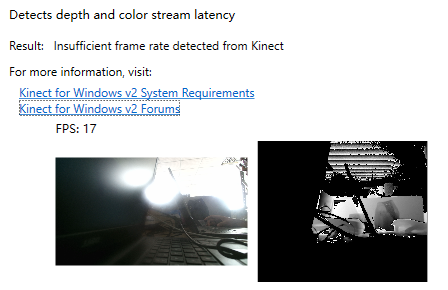
如果能显示图像,说明已经连接成功
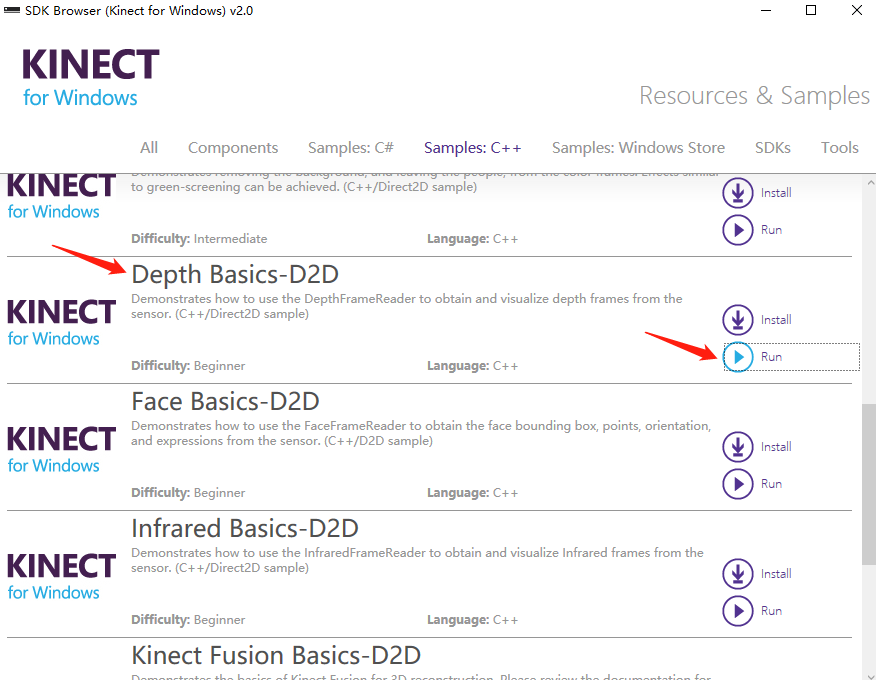
- 测试读取深度图像例子
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号