



















ROS与传感器教程-mmwave AWR1642毫米波使用(Ubuntu)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何在Ubuntu使用mmwave AWR1642毫米波
步骤:
- 下载ros包
$ cd ~/catkin_ws/src
$ git clone https://github.com/radar-lab/ti_mmwave_rospkg.git
$ git clone https://github.com/wjwwood/serial.git
$ cd ../.
$ catkin_make- 查看对应的端口,添加权限
$ ls /dev/ttyACM*
$ sudo chmod 666 /dev/ttyACM0
$ sudo chmod 666 /dev/ttyACM1- 启动AWR1642,测试驱动
$ roslaunch ti_mmwave_rospkg 1642es2_short_range.launch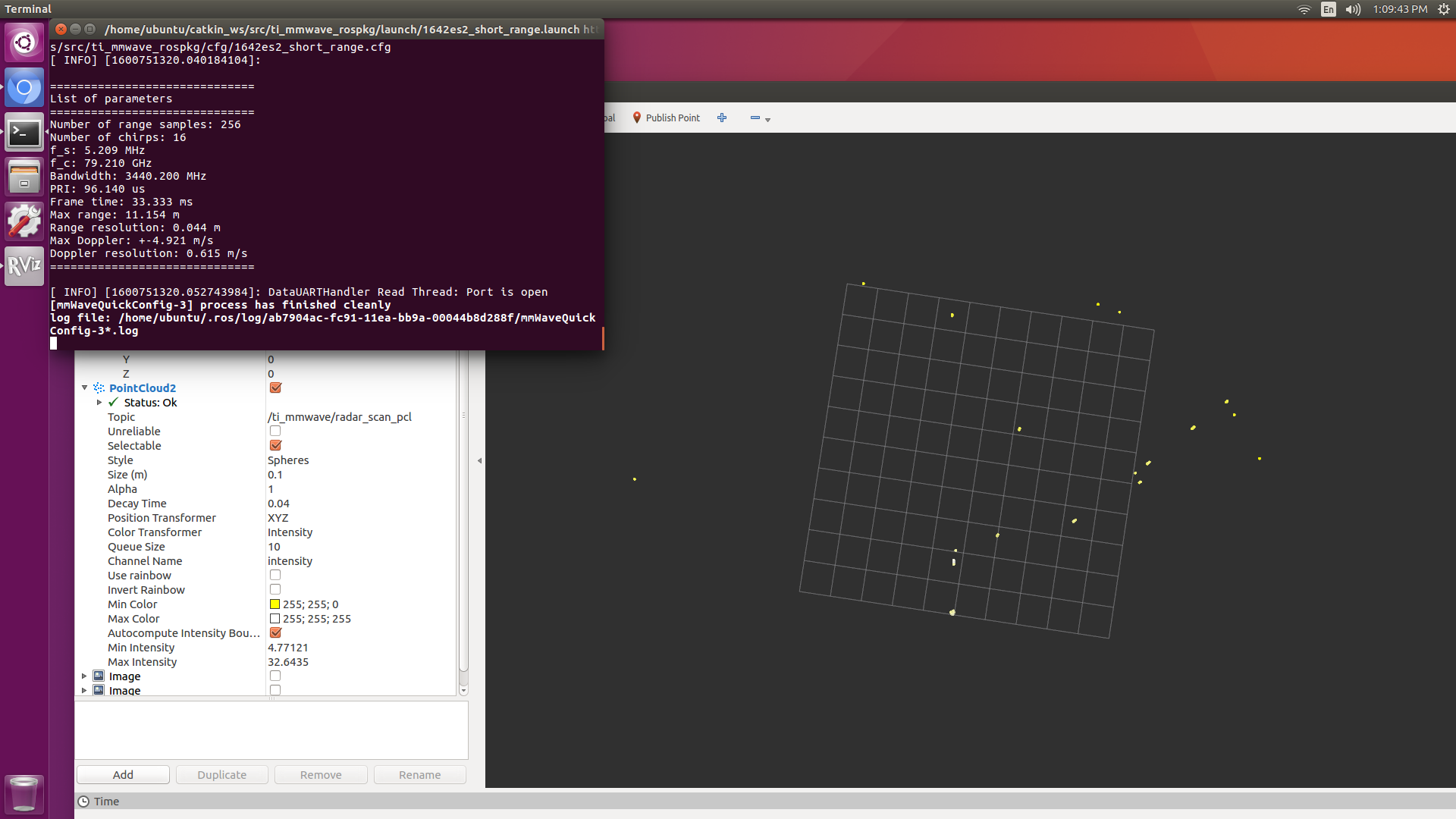
- 打印话题
$ rostopic list
$ rostopic echo /ti_mmwave/radar_scan
header:
seq: 42714
stamp:
secs: 1600675689
nsecs: 28612055
frame_id: ti_mmwave # Frame ID used for multi-sensor scenarios
point_id: 8 # Point ID of the detecting frame (Every frame starts with 0)
x: 1.83203125 # Point x coordinates in m (front from antenna)
y: -0.0 # Point y coordinates in m (left/right from antenna, right positive)
z: 0.0 # Point z coordinates in m (up/down from antenna, up positive)
range: 1.83002197742 # Radar measured range in m
velocity: 0.0 # Radar measured range rate in m/s
doppler_bin: 8 # Doppler bin location of the point (total bins = num of chirps)
bearing: -0.0 # Radar measured angle in degrees (right positive)
intensity: 30.3302135468 # Radar measured intensity in dB参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号