



















ROS与传感器教程-razor-imu-9dof使用(新固件)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS与传感器教程-razor-imu-9dof使用(新固件)
说明:
- 介绍如何使用razor-imu-9dof m0
- 创客智造采购的产品已经刷好固件,可以跳过刷固件,进行测试即可。
- 点击淘宝采购IMU板子
步骤:
环境搭配和固件更新:
- imu板子通过usb线接入电脑
- 安装arduino,下载Arduino IDE 最新版本
- Arduino 插件环境配置,点击参考,并刷好固件
IMU驱动安装:
- 安装依赖
sudo apt-get install ros-kinetic-serial- 下载驱动到工作空间,假设已有工作空间catkin_ws
cd ~/catkin_ws/src/
git clone https://github.com/ncnynl/razor_imu_m0_driver
cd ..
catkin_make- 创建别名
cd ~/catkin_ws/src/razor_imu_m0_driver/scripts
sudo ./create_udev_rules- 重插imu的usb线,即可识别到别名,验证别名
$ ls /dev/imu
/dev/imu- 分配权限
sudo chmod 777 /dev/imu- 启动imu
roslaunch razor_imu_m0_driver driver_node.launch- 查看话题
$ rostopic list
/imu/data_raw
/imu/mag
/imu/data
/rosout
/rosout_aggIMU测试:
- 查看imu内容
$ rostopic echo /imu/data
---
header:
seq: 270
stamp:
secs: 1595397064
nsecs: 860389824
frame_id: imu_link
orientation:
x: -0.0134
y: -0.0614
z: 0.1556
w: 0.9858
orientation_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
angular_velocity:
x: 0.0
y: -0.0010471975512
z: -0.0010471975512
angular_velocity_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
linear_acceleration:
x: 0.784532
y: -0.4903325
z: 10.002783
linear_acceleration_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
---IMU可视化测试:
- 安装imu_tools工具, 假设我们是ros的kinetic版本
sudo apt-get install ros-kinetic-imu-tools- 启动rviz
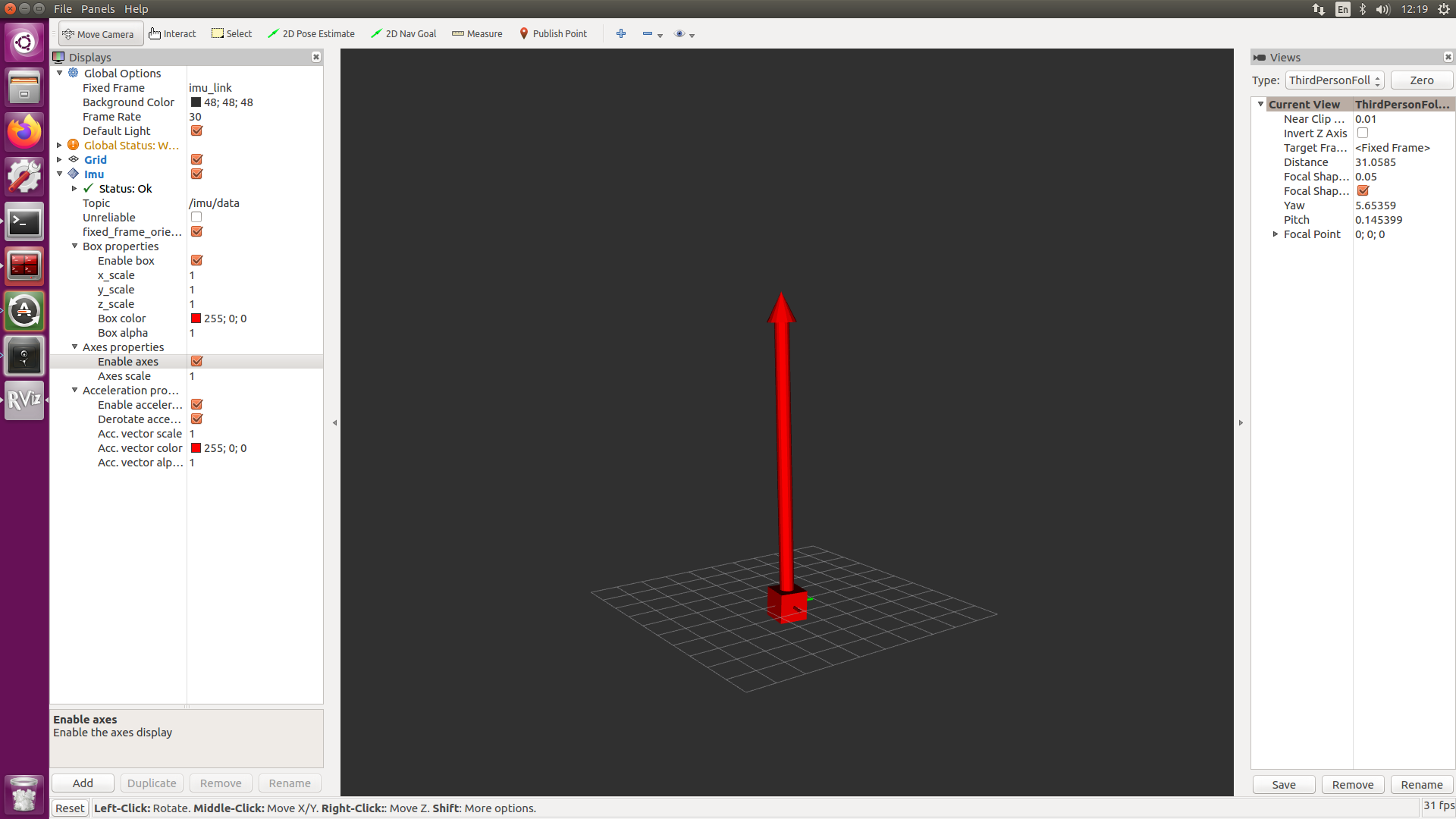
roslaunch razor_imu_m0_driver imu_rviz.launch- 勾选上,Enable box,出现一个立方体
- 勾选上, Enable axes, 出现坐标系
- 勾选上,Enable acceleration,出现向上箭头
- 效果图如下:
校准参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号