



















AlohaMini入门教程-组装-组装主从臂和移动底座组件
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何组装主从臂和移动底座组件
步骤:
- 使用四个 M3x30 六角螺钉和四个 M3 螺母将机械臂固定到 T 型支架的两侧

- 将伺服电机 #11 的 90cm 伺服电缆连接到左臂Waveshare 控制器板上的另一个端口
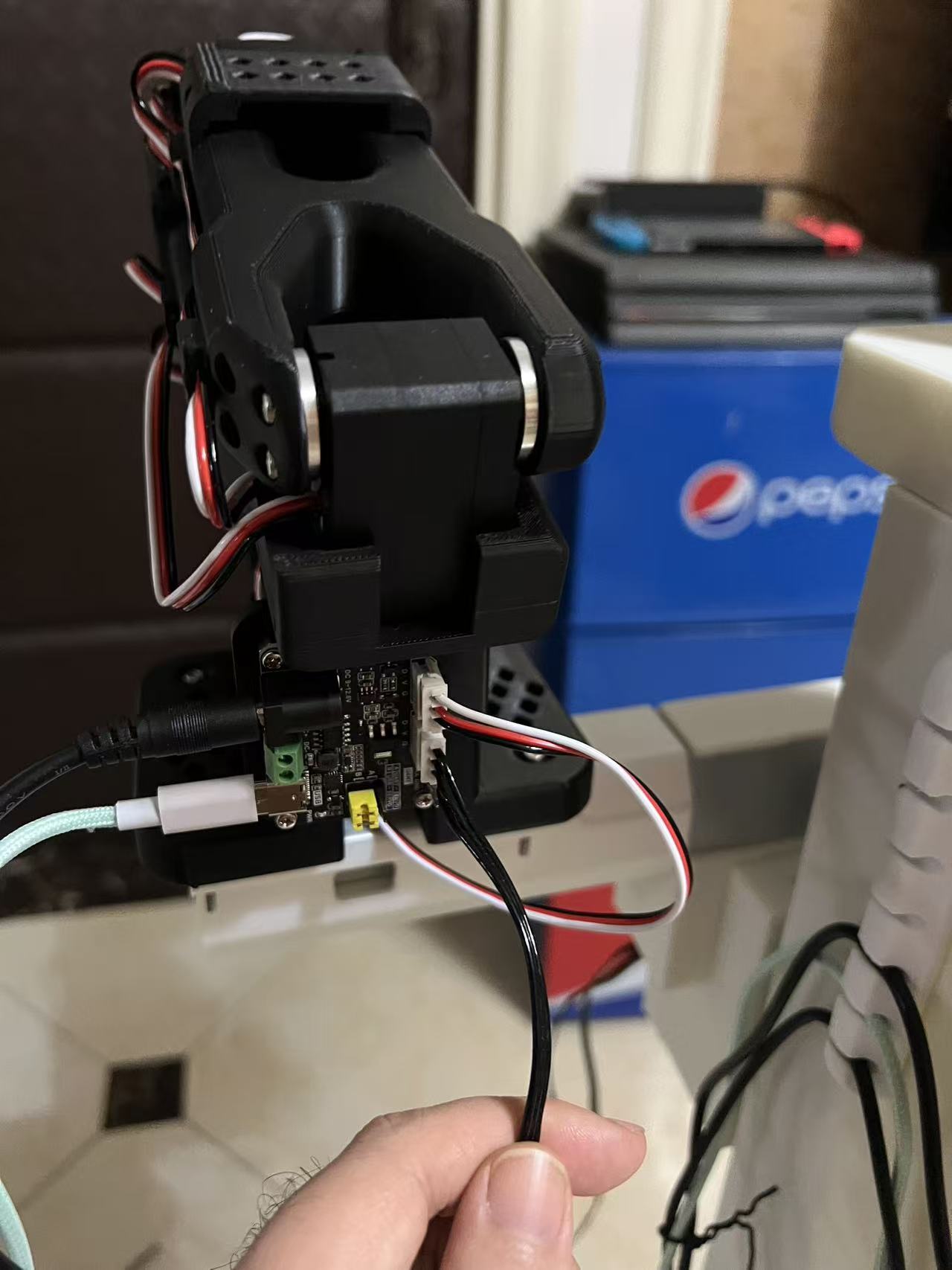
- 将 12V 转 5V 降压转换器连接到基座,然后将其连接到 Raspberry Pi

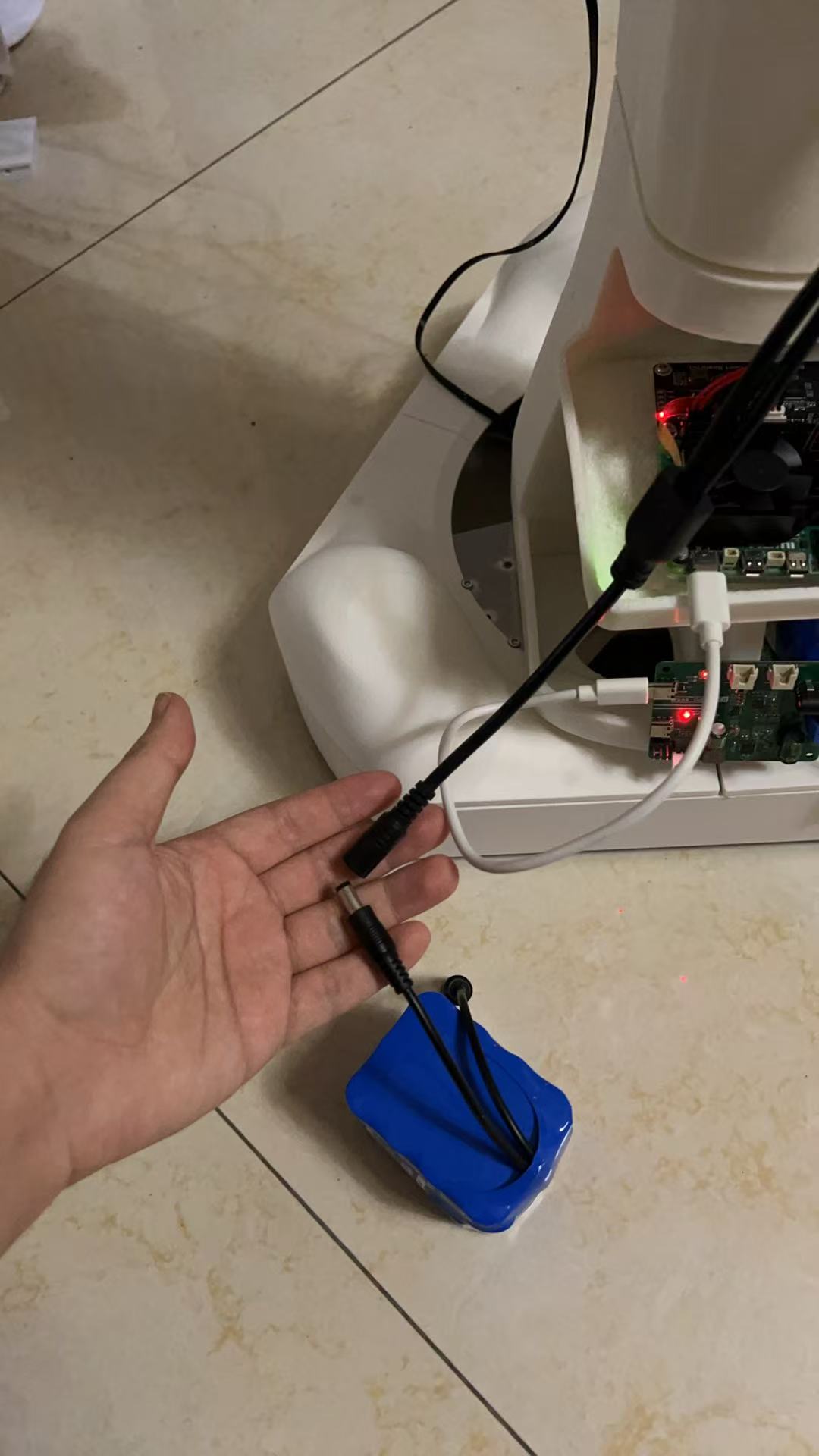
- 将 12V 锂电池连接到降压转换器以供电

- 将 1 转 2 直流分线器的公插头连接到两个直流延长线的母插头上

- 将第二个 12V 锂电池连接到 1 转 2 直流分线器的母连接器上
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号