



















Turbot3-Multi多机协同教程-多机RRT自主探索建图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

Turbot3-Multi多机协同教程-多机RRT自主探索建图
说明:
- 介绍如何利用rrt-exploration包完成自主探索建图
相关设备:
- Turbot3-Multi套件,采购地址
步骤:
- 关闭此前打开的ros程序,以免造成冲突
./multi_scripts/multi_kill.sh- 新开终端,启动多机
./multi_scripts/multi_robot.sh- 新开终端,启动初始化位姿,参考位资设置
./multi_scripts/multi_init_pose.sh- 新开终端,启动建图
./multi_scripts/multi_slam.sh- 新开终端,检查TF是否正常
rosrun rqt_tf_tree rqt_tf_tree- 效果如图:

- 需要保证TF正确才能进行下一步,如果不正确,需要重新关闭后在重新开始,直到TF正确。
- 新开终端,启动合并地图和rviz
./multi_scripts/multi_map_merge_rrt.sh- 效果如下:
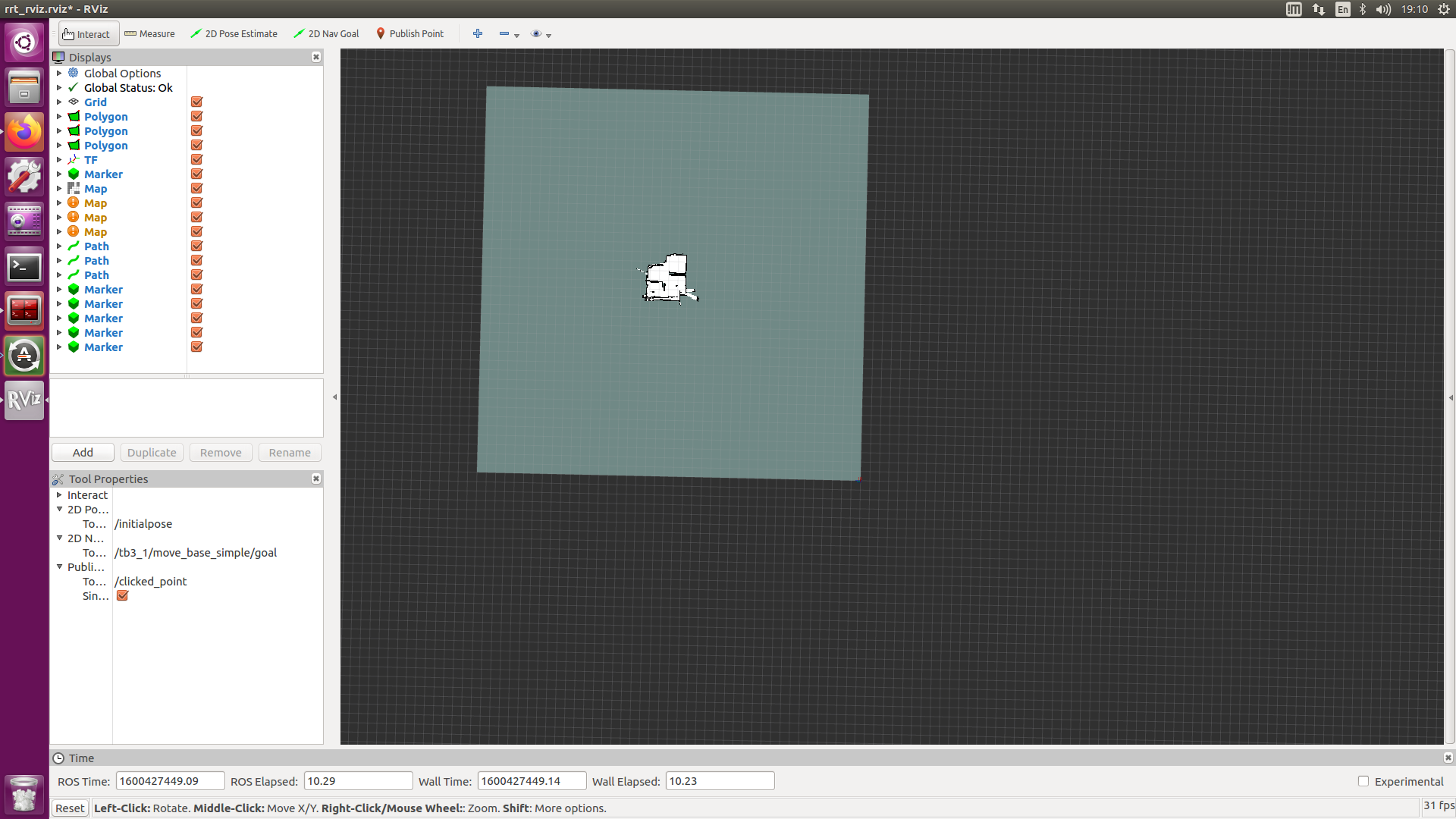
- 新开终端,启动自主探索
./multi_scripts/multi_rrt.sh- 效果如图:
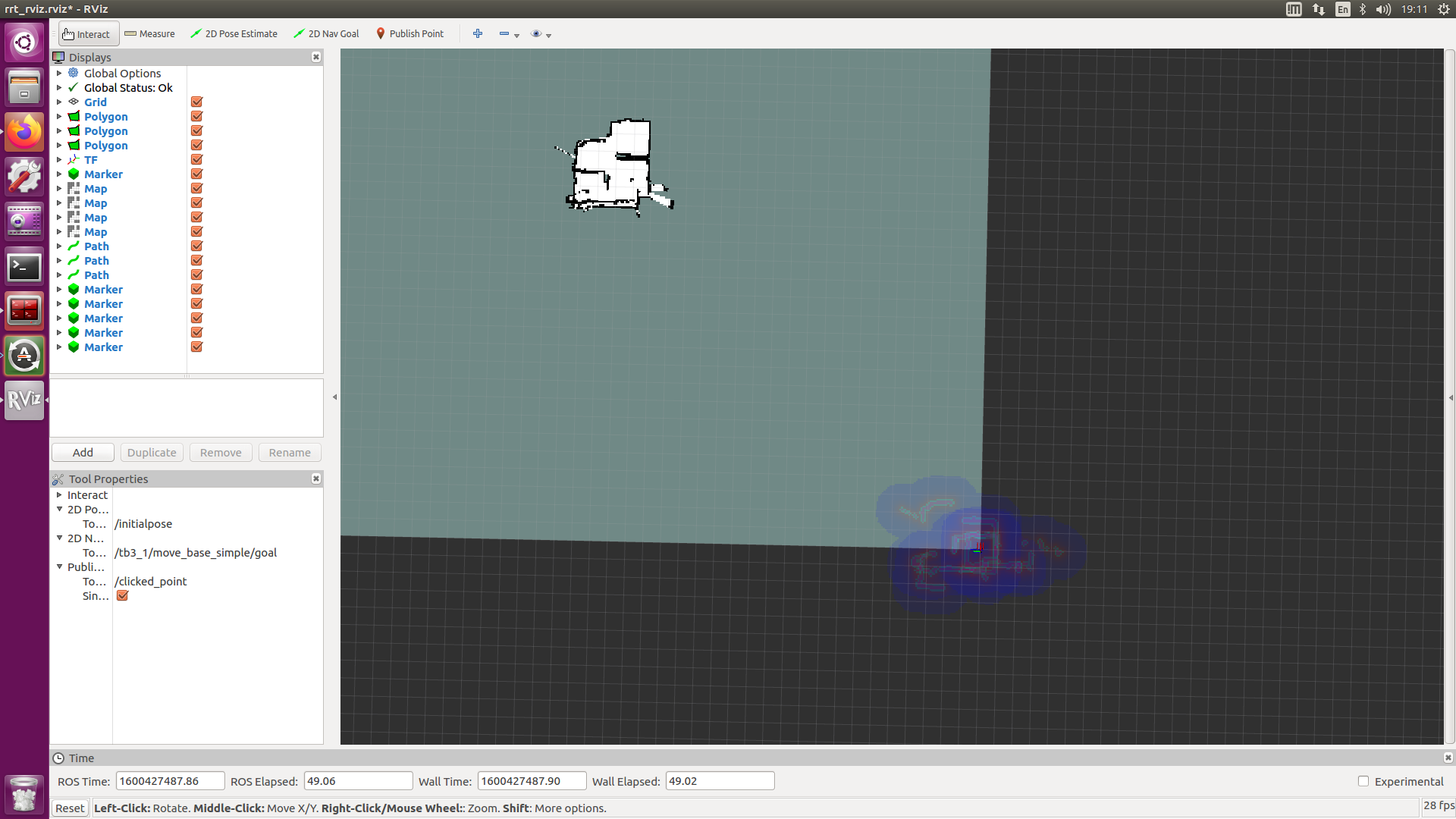
- 在rviz上利用Publish Point 点5个点,其中四个点包含所有的小车
- 效果如图:
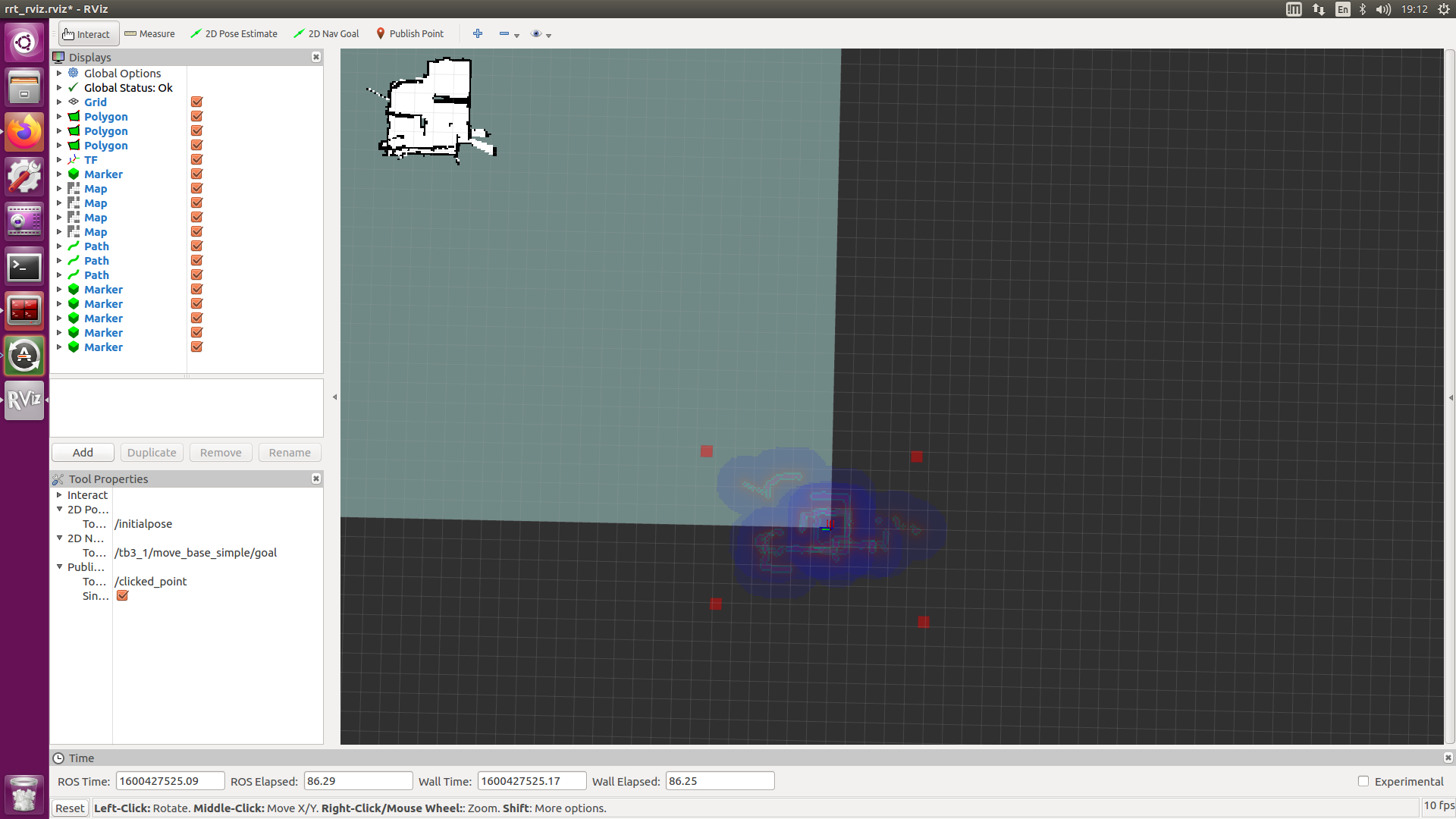
- 最后一个点选择为四个点的中间的位置
- 效果如图:
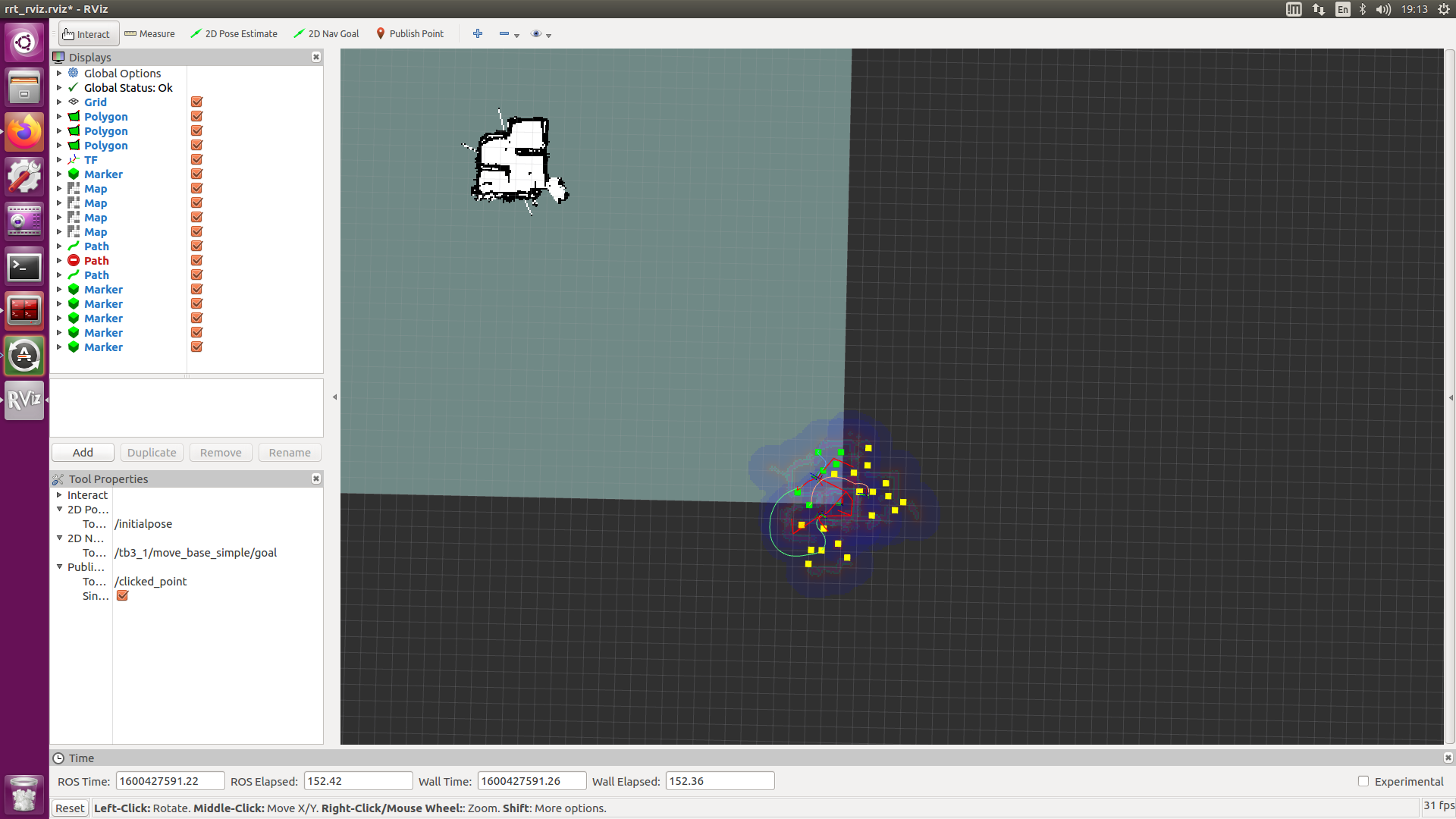
- 操作完成之后,小车就开始自主探索, 需要花一段时间,小车才能正式跑起来
- 跑一段时间之后,查看合并地图,如果建图效果差不多了
- 效果如下:

- 新开终端,保存地图
./multi_scripts/multi_save_map.sh演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=457164708&bvid=BV1G541187Y6&cid=237489938&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流